1-урок
Цели проекта
– Понять роль науки в нашей жизни;
– Сделать роботизированную руку.
Руководство для учителя
– Поделите учеников на группы;
– Сделайте краткий обзор теоретической части;
– Затем приступите к практической части;
– Проконтролируйте вовлеченность всех учеников в команде;
– Помогите распределить работу между членами команды.
Техника безопасности на уроках Steam
Перед началом урока учителю рекомендуется ознакомиться с техникой безопасности. При необходимости (в случае использование предметов указанных в ТБ) провести краткий инструктаж учащимся. Перейдите по ссылке Техника безопасности на уроках Steam
Теоретическая часть
Наука о разработке роботизированных рук, наряду с другими искусственными конечностями и органами, называется протезированием. Ученые, инженеры и врачи работают вместе над созданием искусственных частей тела для замены людям, которые потеряли органы или конечности в результате несчастных случаев или болезней. Создание руки робота, которая может легко брать самые разные предметы, как это делает человеческая рука, — очень сложная задача, над которой профессиональные инженеры работают по сей день!


Фотограф: Pavel Danilyuk: https://www.pexels.com/ru-ru/photo/8439093/
Фотограф: Polina Tankilevitch: https://www.pexels.com/ru-ru/photo/5386252/
Background фото создан(а) rawpixel.com – ru.freepik.com</a>
Используя материалы, предложенные в этом проекте, вы сможете построить роботизированную руку, которая может поднимать небольшие легкие предметы. Предметы, которые слегка мягкие или имеют грубую текстуру (например, кусок пенопласта), может быть легче поднять, чем твердые и гладкие предметы (например, мяч для настольного тенниса). Вам может быть трудно поднимать тяжелые предметы (например, кофейную кружку), потому что трубочки недостаточно прочные и будут сгибаться назад. Форма и разнообразие объектов, которые вы можете поднять, будут сильно зависеть от того, сколько пальцев у вас на руке и как вы их расположите. Например, вы можете создать руку, которая очень хорошо поднимает бумажные стаканчики, но с трудом справляется с мячиками для настольного тенниса, или наоборот.
Практическая часть
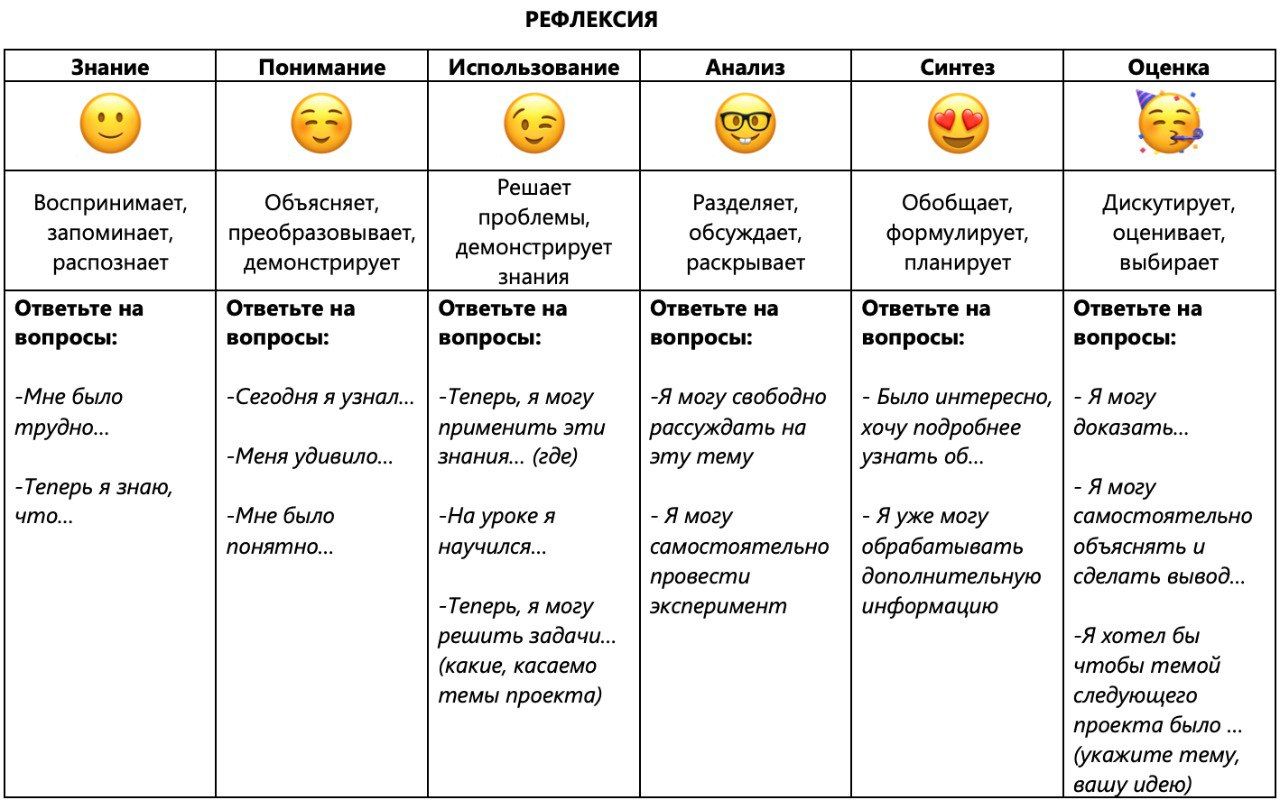
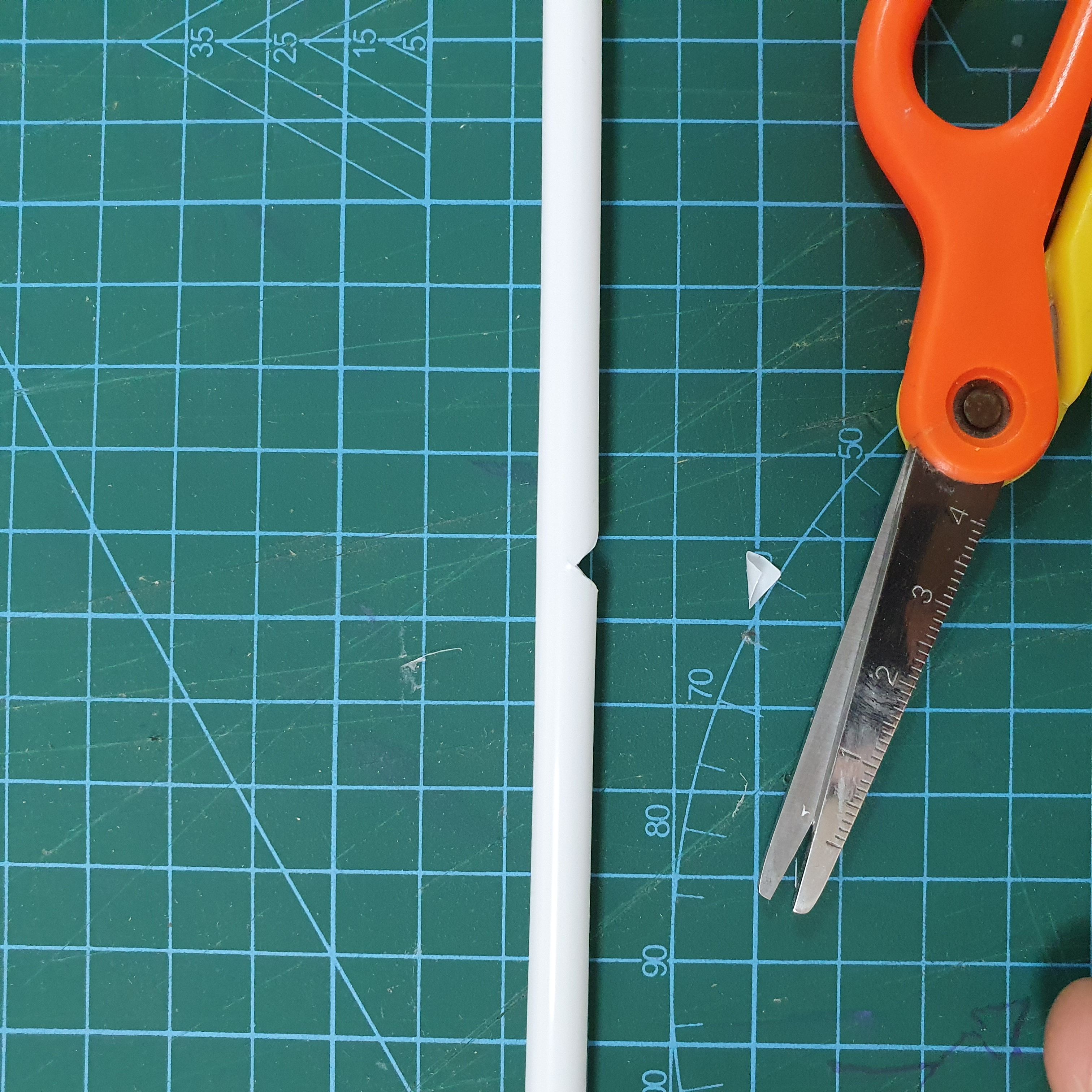
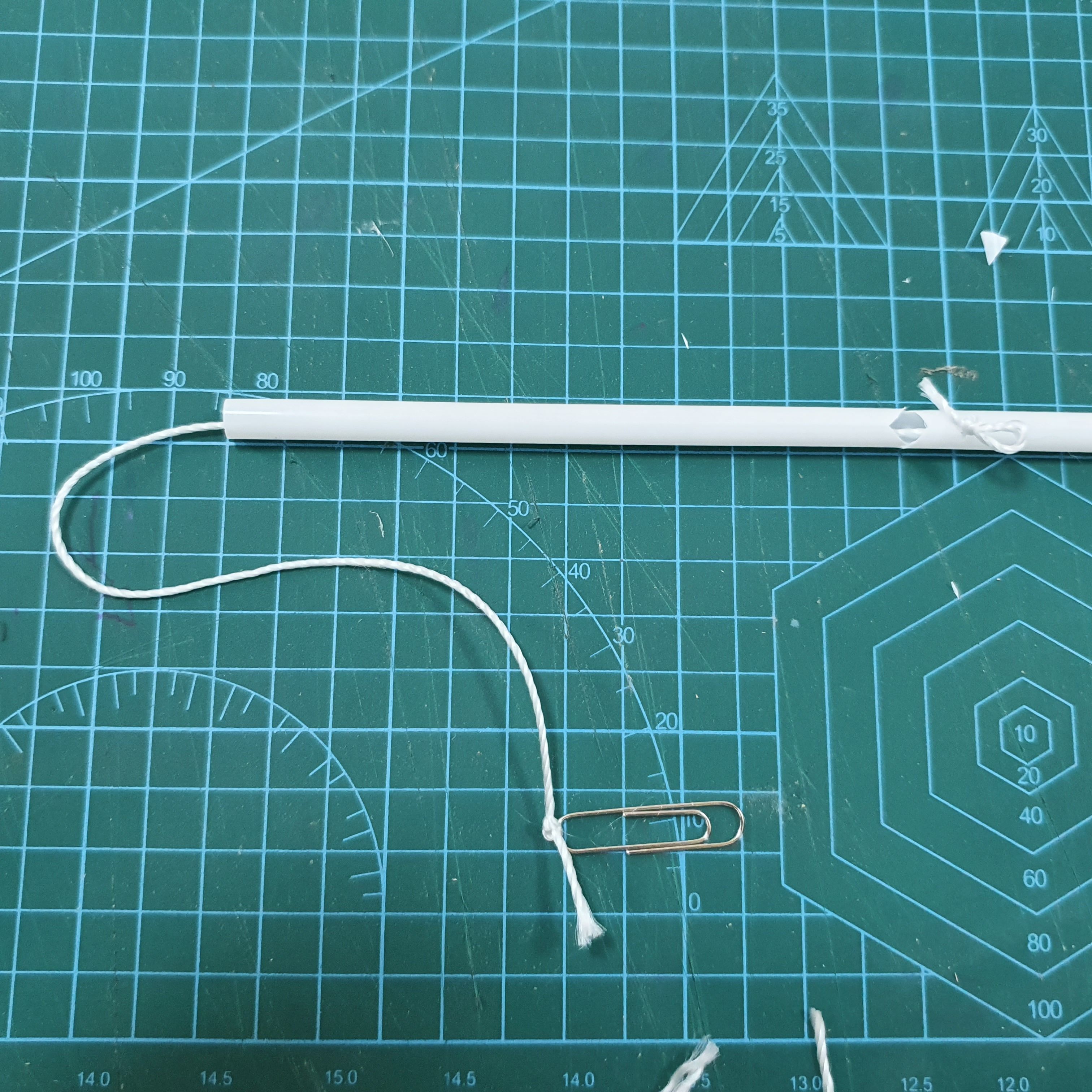
1. Сделайте небольшой треугольный надрез в трубочке примерно на половине ее длины. Трубочка будет пальцем, а выемка будет суставом. В результате вы сможете перегнуть трубочку и согнуть ее в суставе.
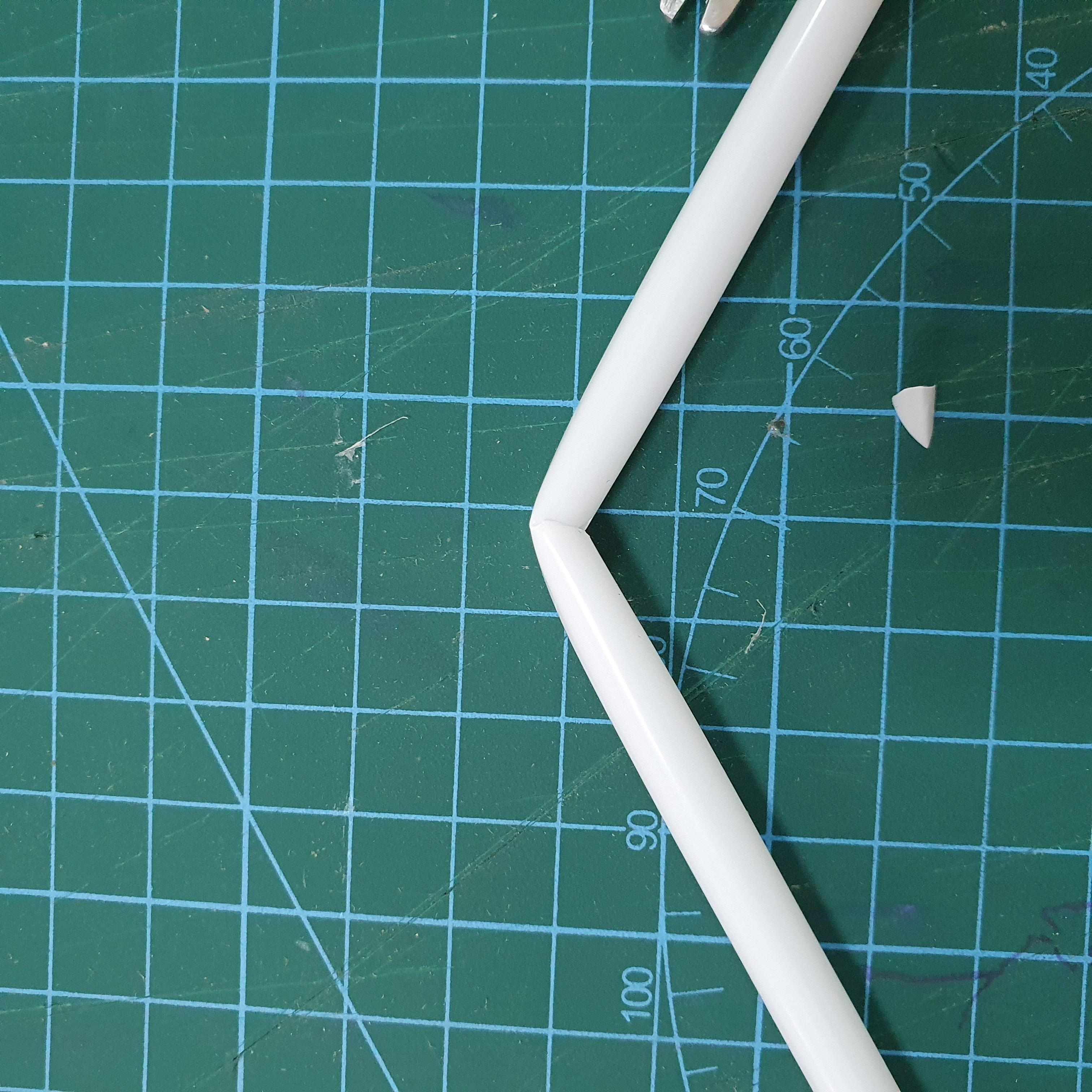
2. Сделайте маленькое отверстие чуть выше выемки, и проденьте веревку через трубочку.

3. Завяжите веревку над отверстием в соломинке, а к другому концу привяжите скрепку.
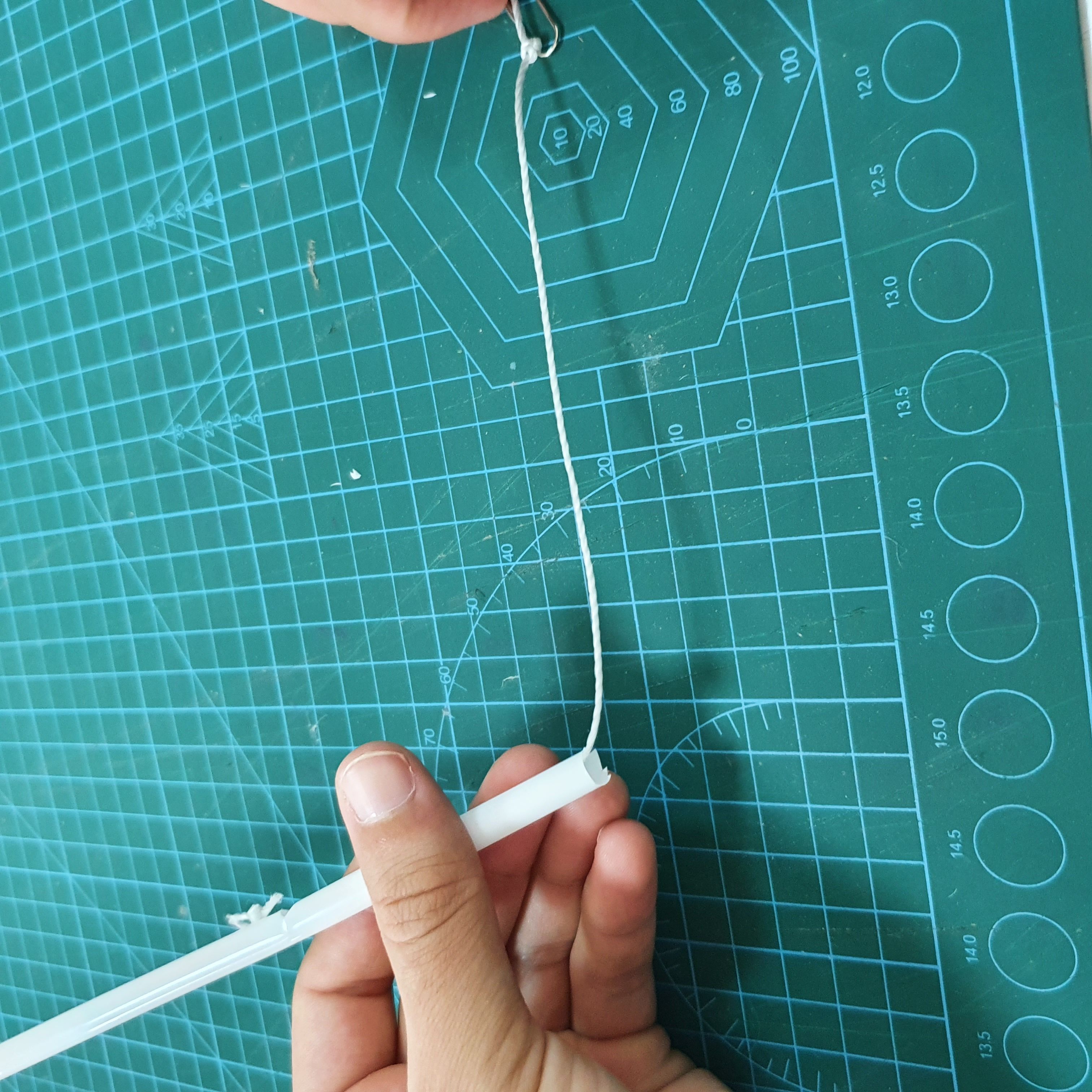
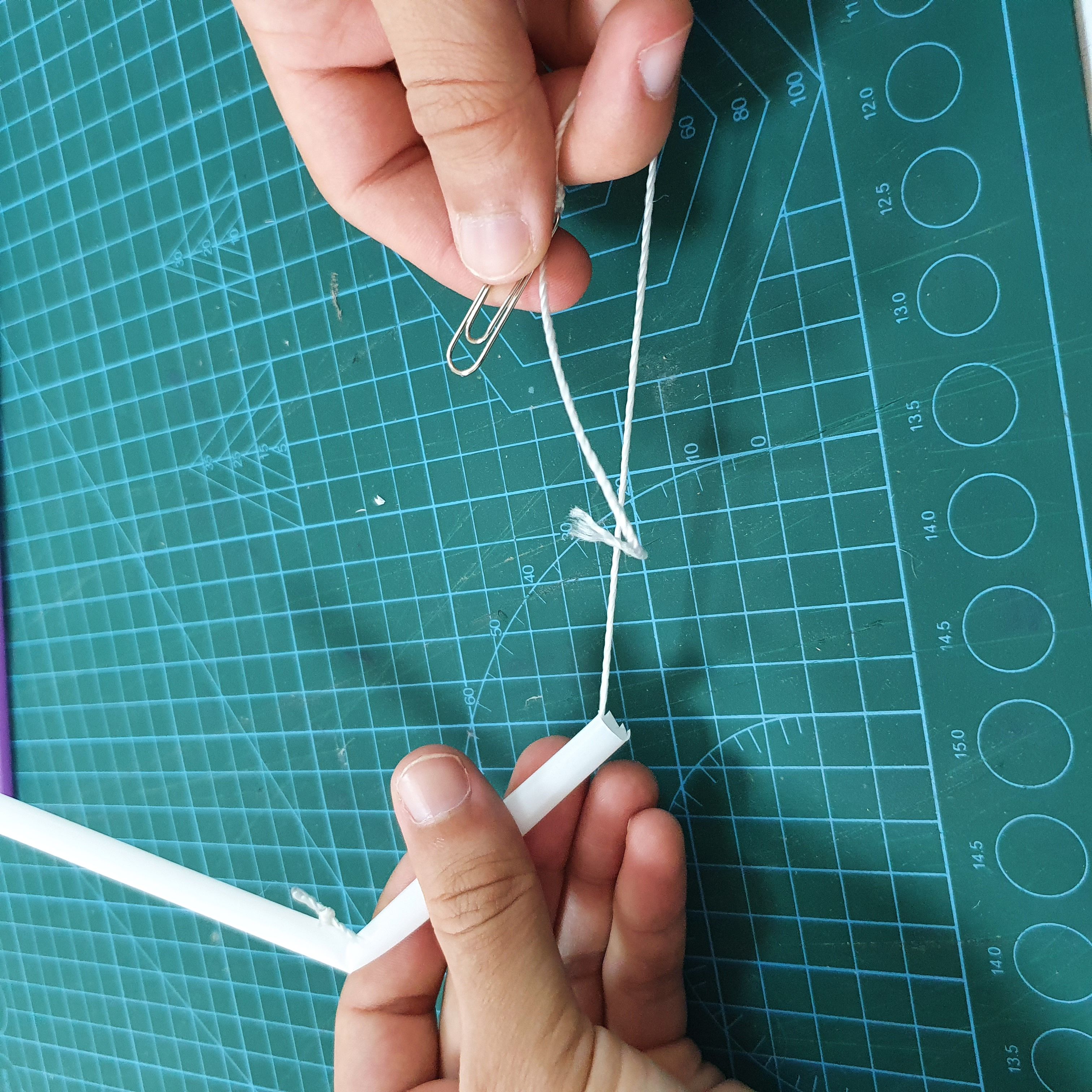
4. Держите основание соломинки одной рукой, а скрепку другой рукой. Когда вы тяните за скрепку, соломинка должна сгибаться.
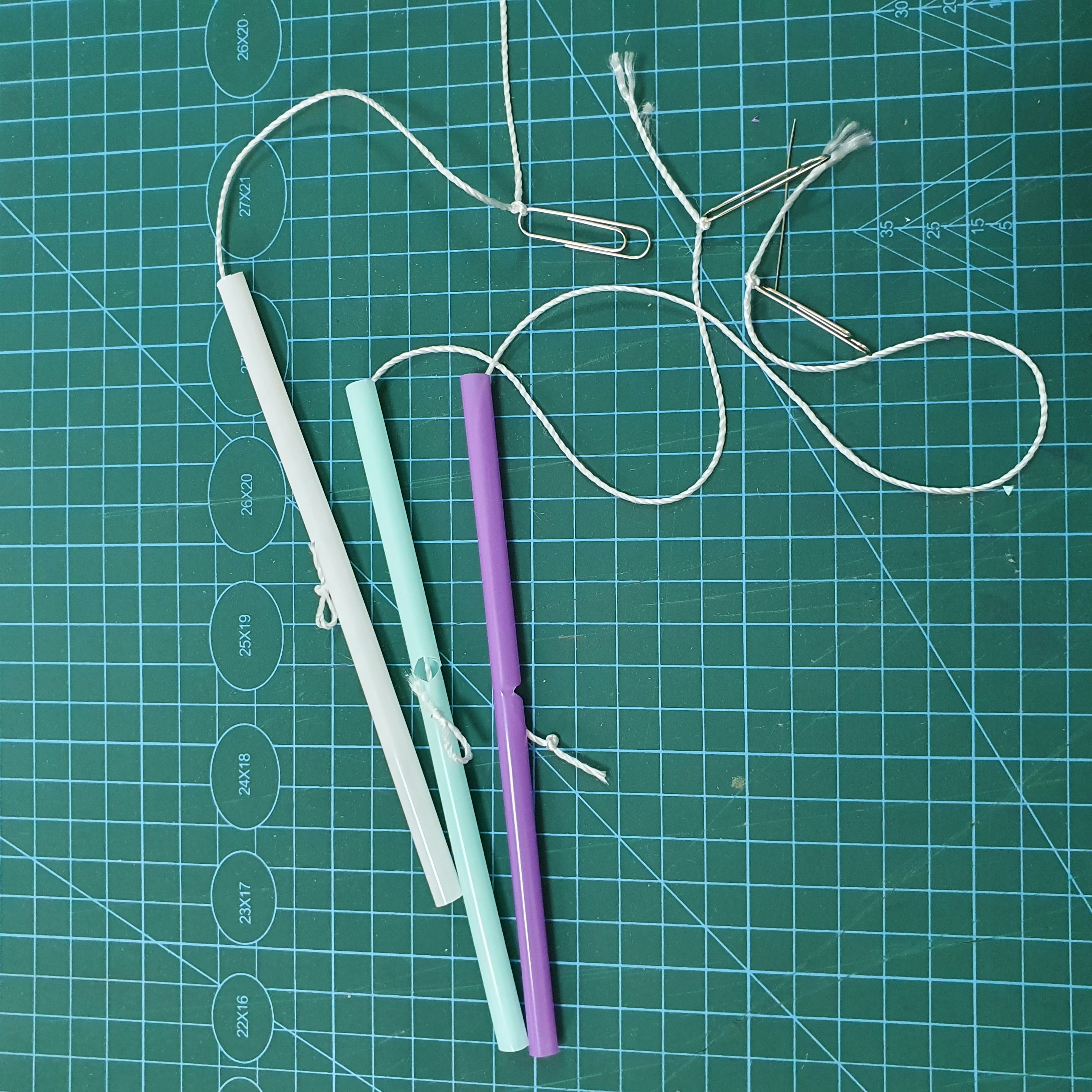
5. Сделайте еще два пальца так же, как первый.
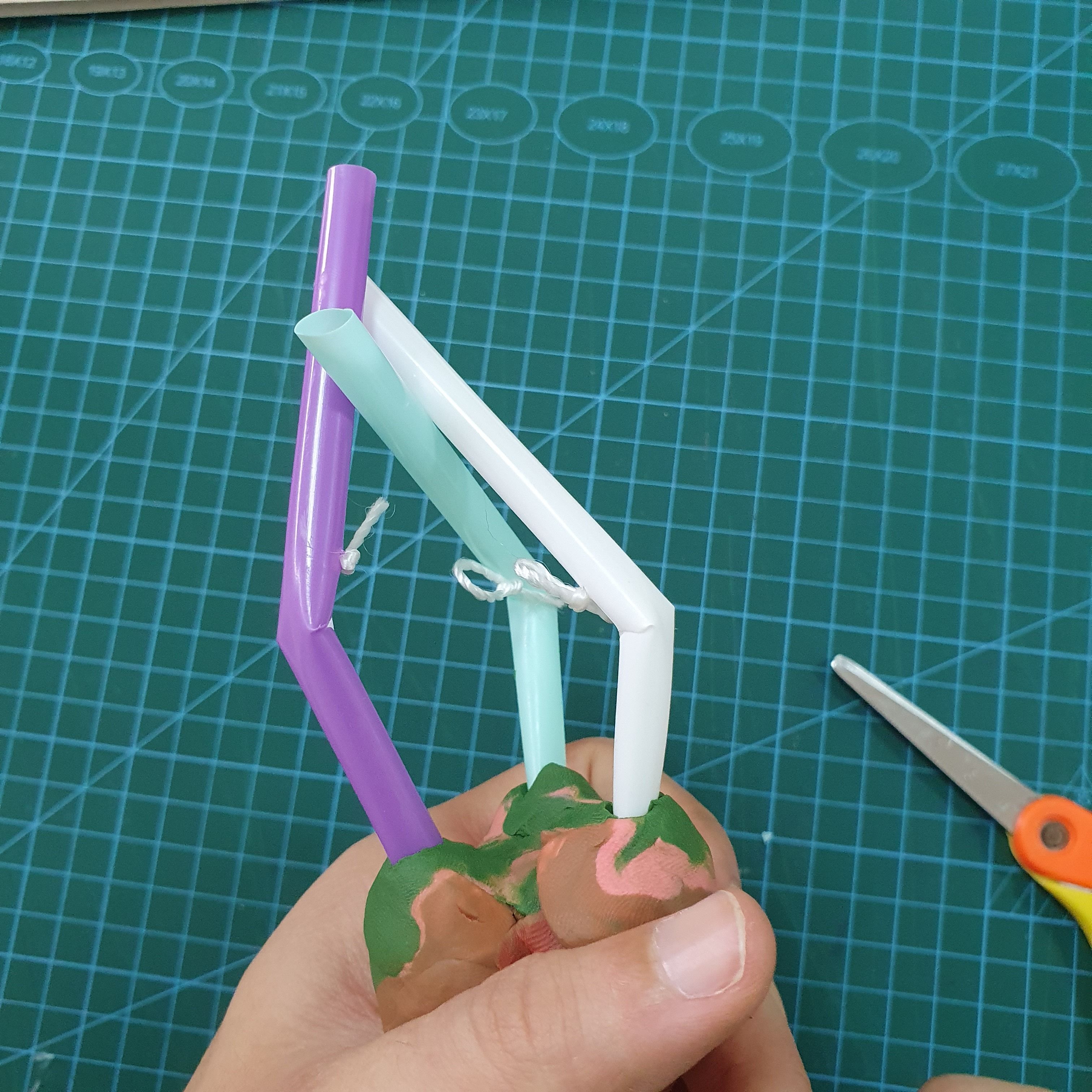
6. Сформируйте ладонь из пластилина вокруг основания трубочек. Убедитесь, что выемки на соломинках обращены друг к другу.
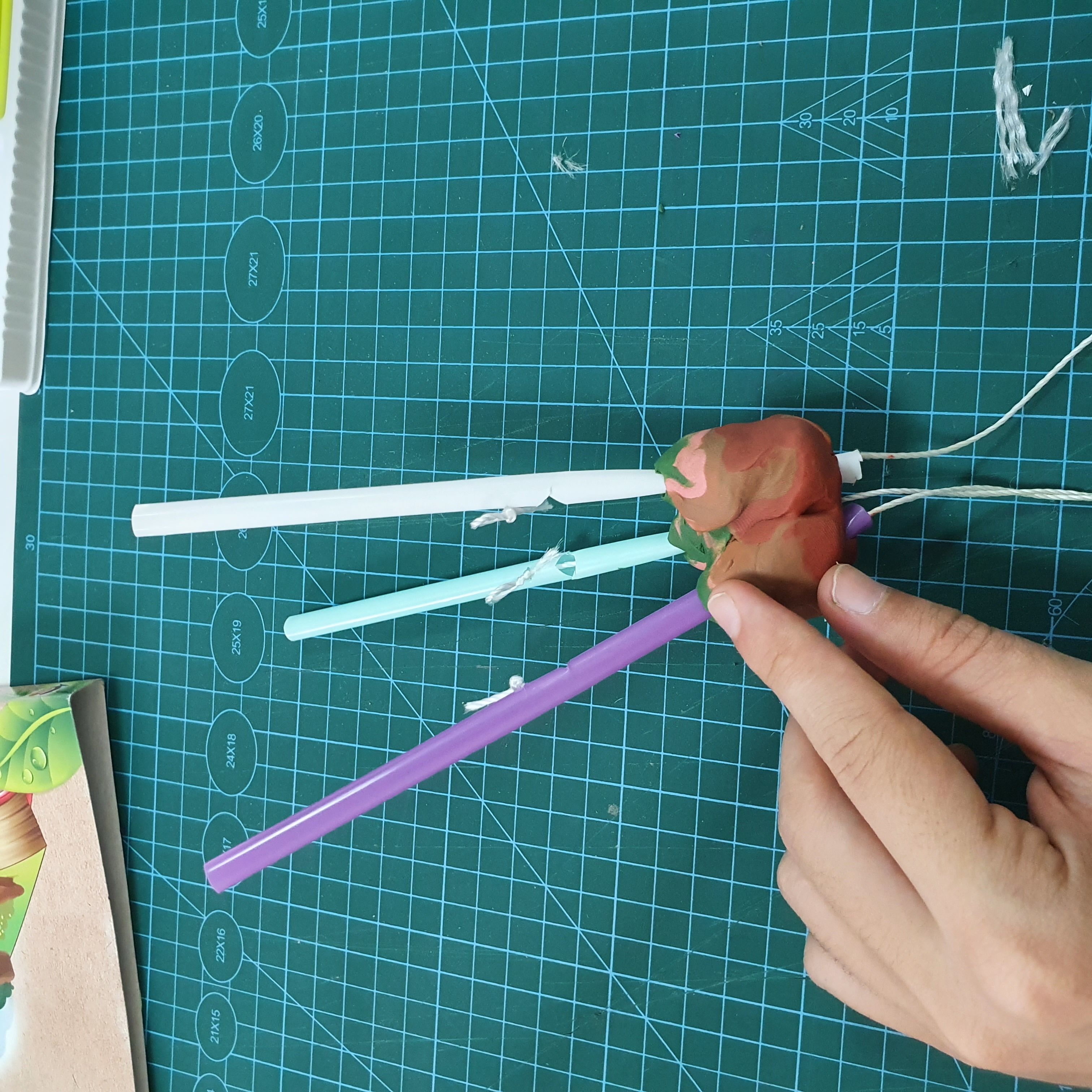
7. Держите пластилин одной рукой, а скрепки – другой рукой. Когда вы натягиваете скрепки, пальцы должны сгибаться.
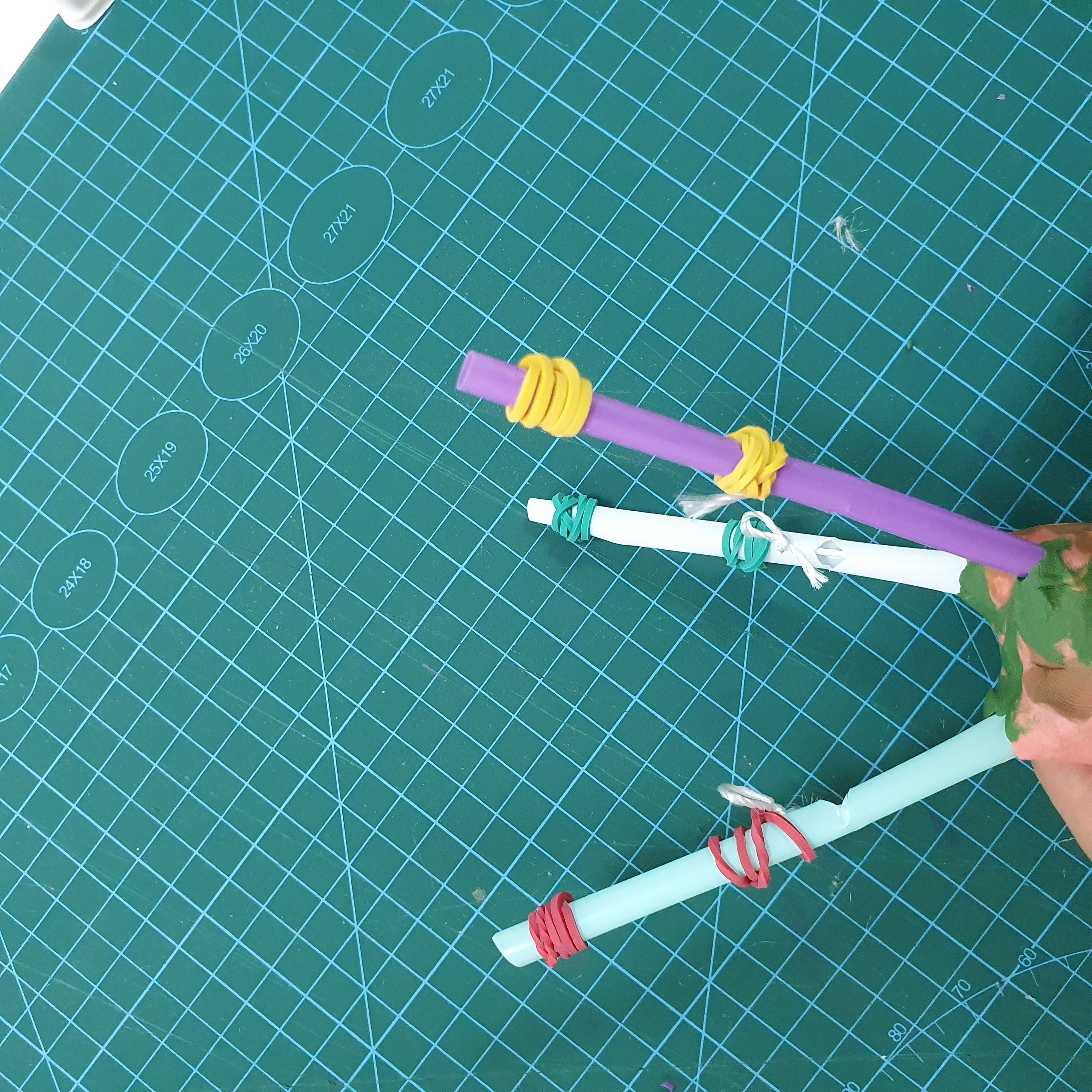
8. Оберните резинки вокруг соломинок. Это может помочь улучшить их сцепление.
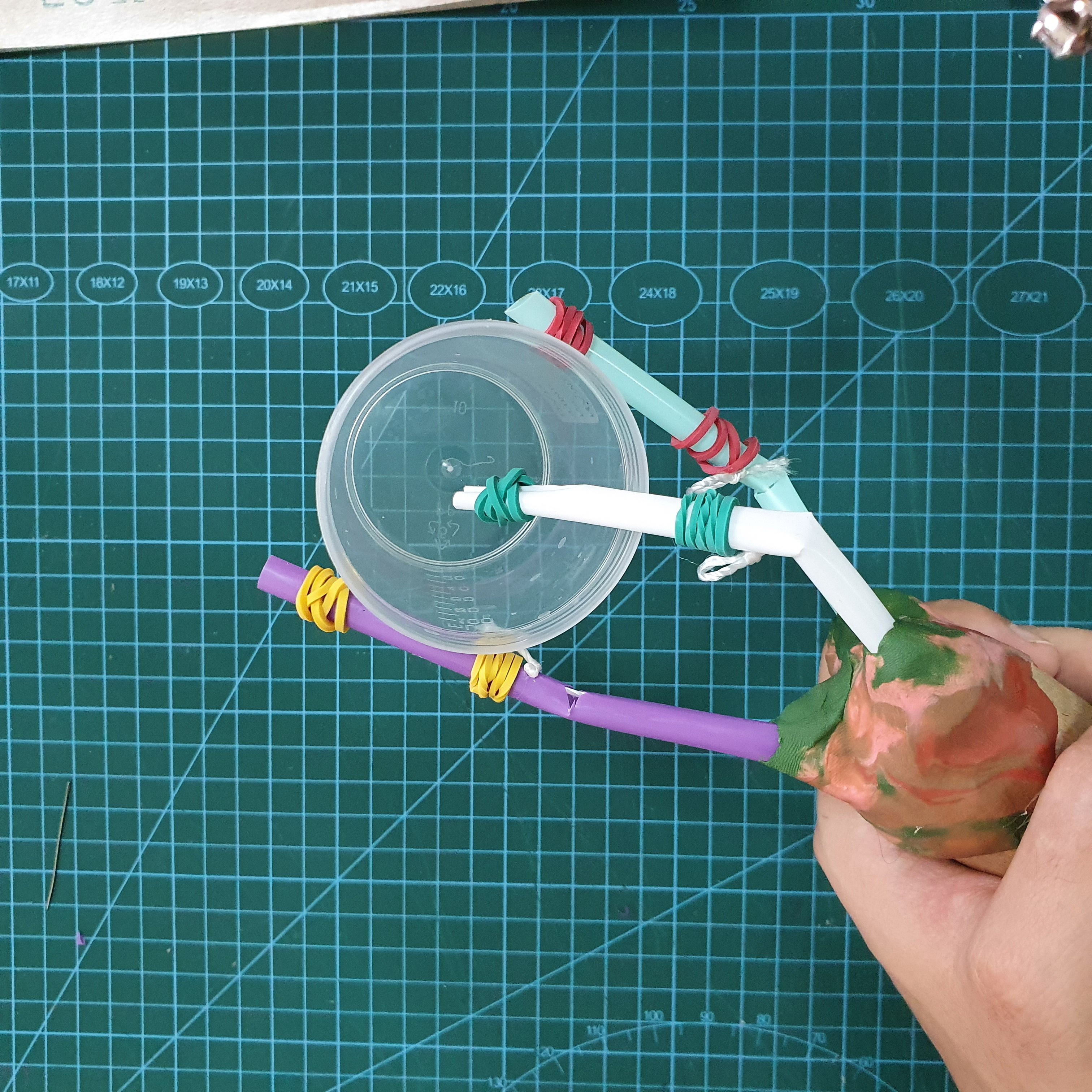
12. Вырежьте картон, согните в трубу и закрепите термоклеем, тем самым сделав трубу. Прикрепите пластилин к концу картонной трубы, чтобы сформировать «руку». Возможно, вам придется связать более длинные нити и продеть их через трубку.
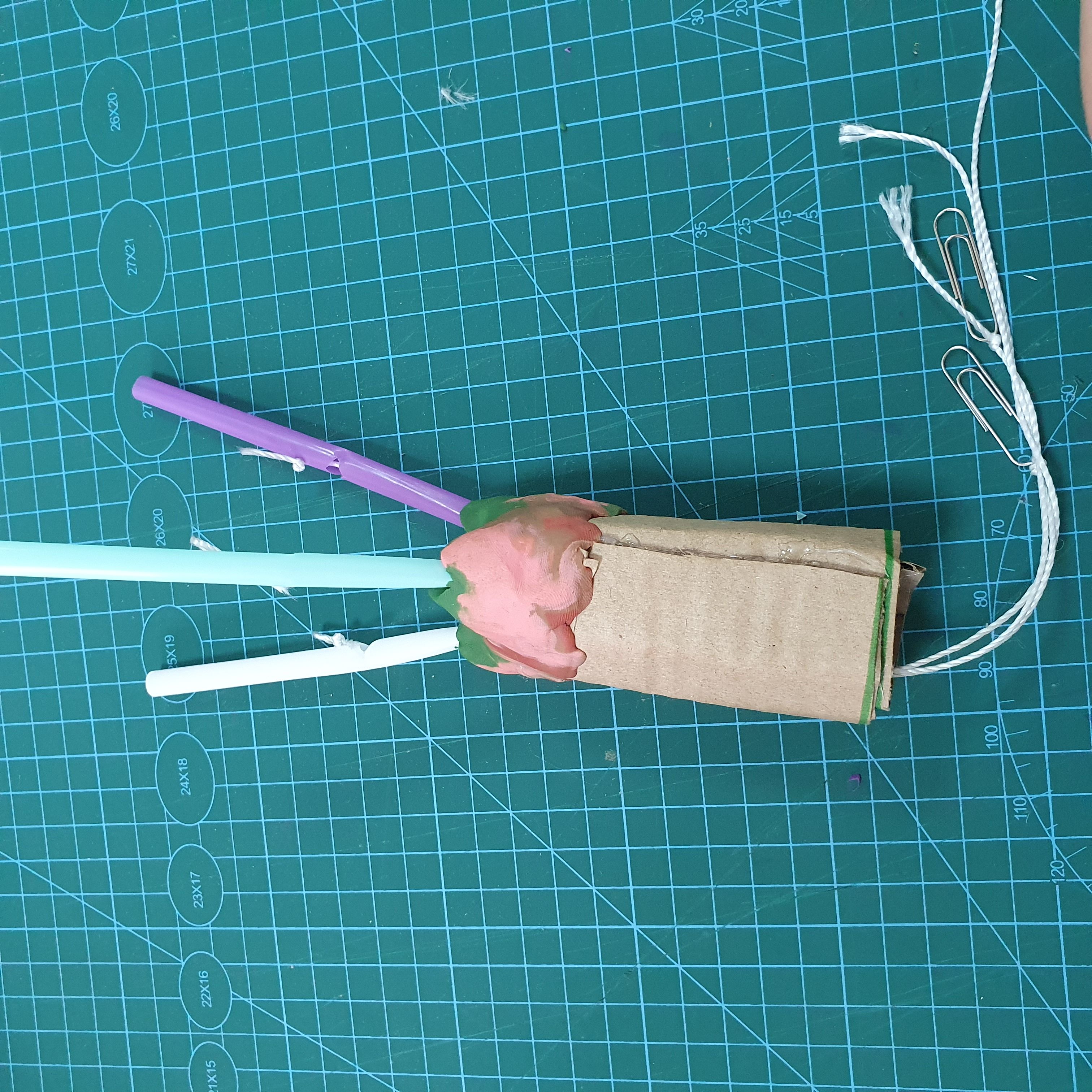
13. Теперь возьмите картонную трубку и потяните за веревку (нитки), чтобы попытаться использовать свою роботизированную руку, для поднятия маленьких легких предметов.
Вы можете попробовать сделать палец посложнее. Например, пальцы с несколькими суставами, каждый из которых независимо управляется отдельной ниткой.
Можете сделать руку с различными комбинациями и ориентациями пальцев и суставов. Можете ли вы сделать «коготь»? Как насчет человеческой руки с четырьмя пальцами разной длины и большим пальцем?
 Ваша рука состоит из костей, мышц, суставов и сухожилий. Кости обеспечивают жесткую структуру руки, как и соломинки в этом проекте. Суставы обеспечивают места для сгибания пальцев, как выемки в ваших соломинках. Сухожилия натягивают суставы, заставляя различные сегменты сгибаться, как струна в руке вашего робота. Работу мышц в вашей руке по-прежнему обеспечивается человеком, так как в конечном счете именно вы тянете скрепки. В настоящих роботизированных руках есть электродвигатели, которые действуют как мышцы.
Ваша рука состоит из костей, мышц, суставов и сухожилий. Кости обеспечивают жесткую структуру руки, как и соломинки в этом проекте. Суставы обеспечивают места для сгибания пальцев, как выемки в ваших соломинках. Сухожилия натягивают суставы, заставляя различные сегменты сгибаться, как струна в руке вашего робота. Работу мышц в вашей руке по-прежнему обеспечивается человеком, так как в конечном счете именно вы тянете скрепки. В настоящих роботизированных руках есть электродвигатели, которые действуют как мышцы.
Оценивание
Критерий оценивания по PBL:
Project based learning (проектно-ориентированное обучение) – это метод обучения, при котором учащиеся приобретают знания и навыки, работая над одним проектом, для исследования и поиска ответа на подлинный, интересный и сложный вопрос, проблему или вызов.
.png)