
Lesson 1
Project Goals
– Understand the role of science in our lives;
– Make a robotic arm.
Teacher’s Guide
– Divide students into groups;
– Make a brief overview of the theoretical part;
– Then proceed to the practical part;
– Control the involvement of all students in the team;
– Help distribute work among team members.
Safety in Steam Lessons
Before starting a lesson, the teacher is advised to familiarize himself with the safety precautions. If necessary (in the case of using the items specified in the TB), conduct a brief briefing for students. Follow this link Safety in Steam Lessons
Theoretical part
The science of designing robotic arms, along with other artificial limbs and organs, is called prosthetics. Scientists, engineers, and doctors are working together to create artificial body parts to replace people who have lost organs or limbs due to accidents or diseases. Creating a robot arm that can easily pick up a wide variety of objects, just like a human hand, is a very difficult task that professional engineers are working on to this day!


Photographer: Pavel Danilyuk: https://www.pexels.com/ru-ru/photo/8439093/
Photographer: Polina Tankilevitch: https://www.pexels.com/ru-ru/photo/5386252/
Background rawpixel.com – ru.freepik.com</a>
Using the materials provided in this project, you will be able to build a robotic arm that can lift small, lightweight objects. Objects that are slightly soft or have a rough texture (such as a piece of styrofoam) may be easier to lift than hard, smooth objects (such as a table tennis ball). You may find it difficult to lift heavy objects (such as a coffee mug) because the straws are not strong enough and will bend backward. The shape and variety of objects you can pick up will greatly depend on how many fingers you have and how you position them. For example, you can create a hand that is very good at lifting paper cups but has difficulty handling ping pong balls, or vice versa.
Practical part
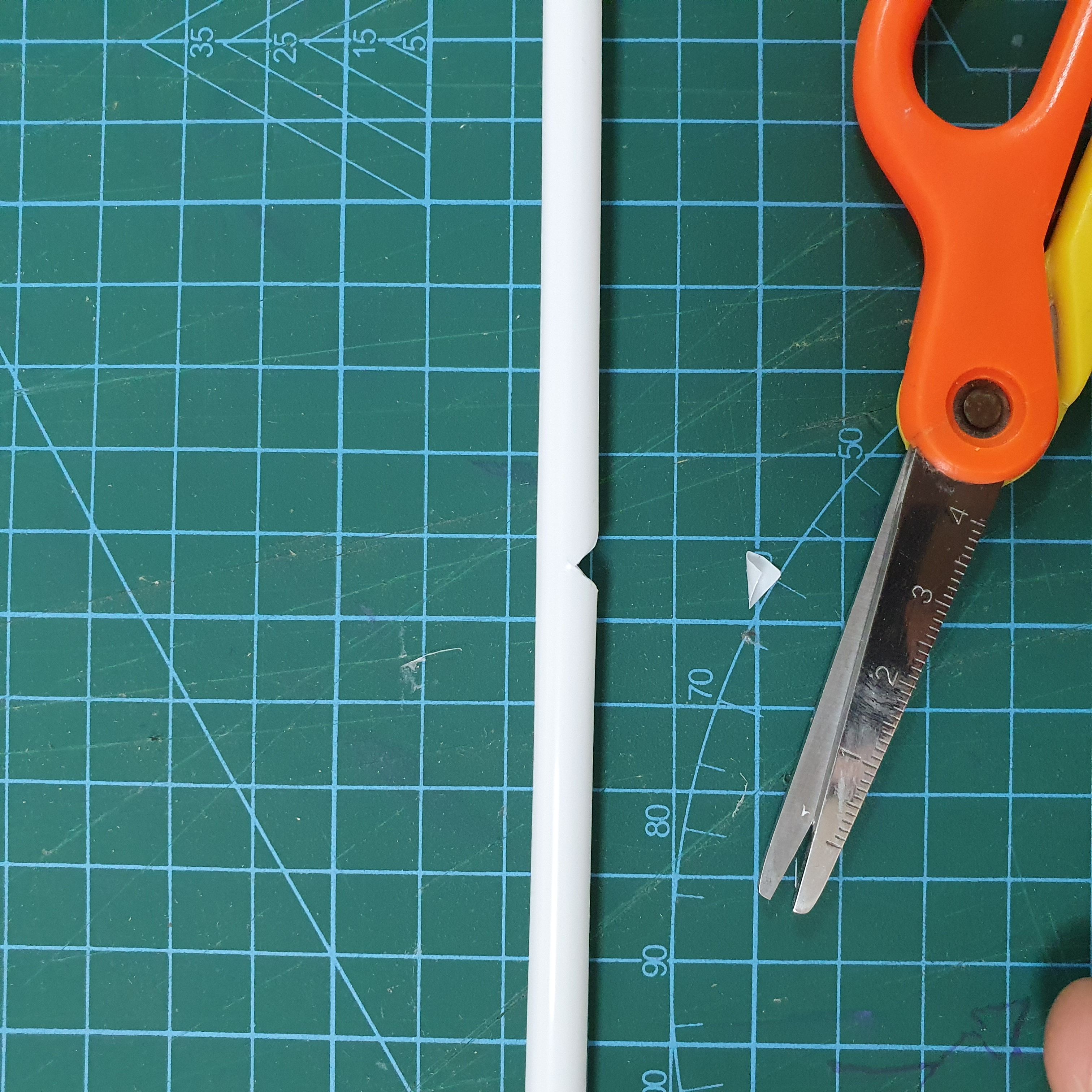
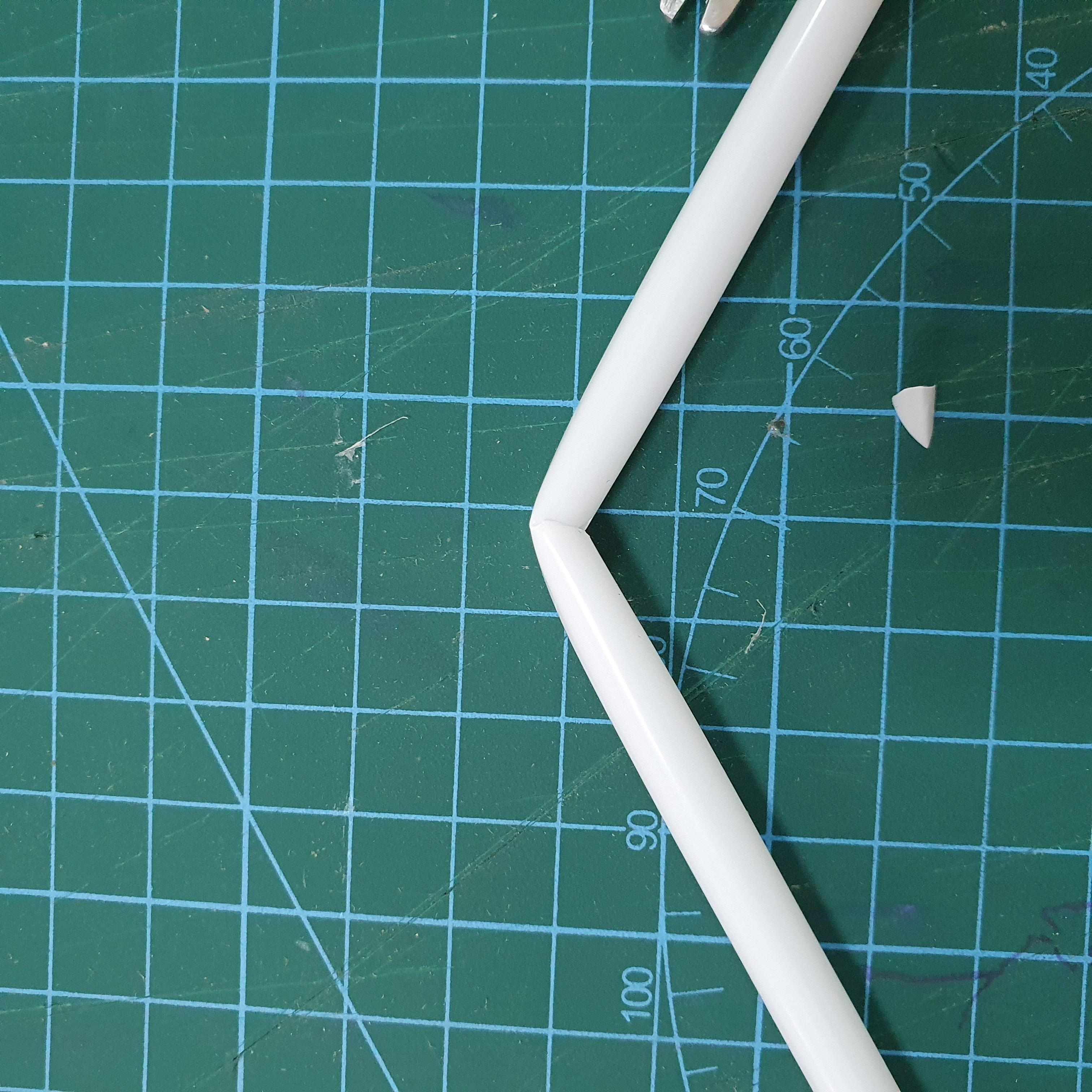
1. Make a small triangular cut in the tube at about half its length. The tube will be the finger and the notch will be joint. As a result, you can bend the tube and bend it at the joint.
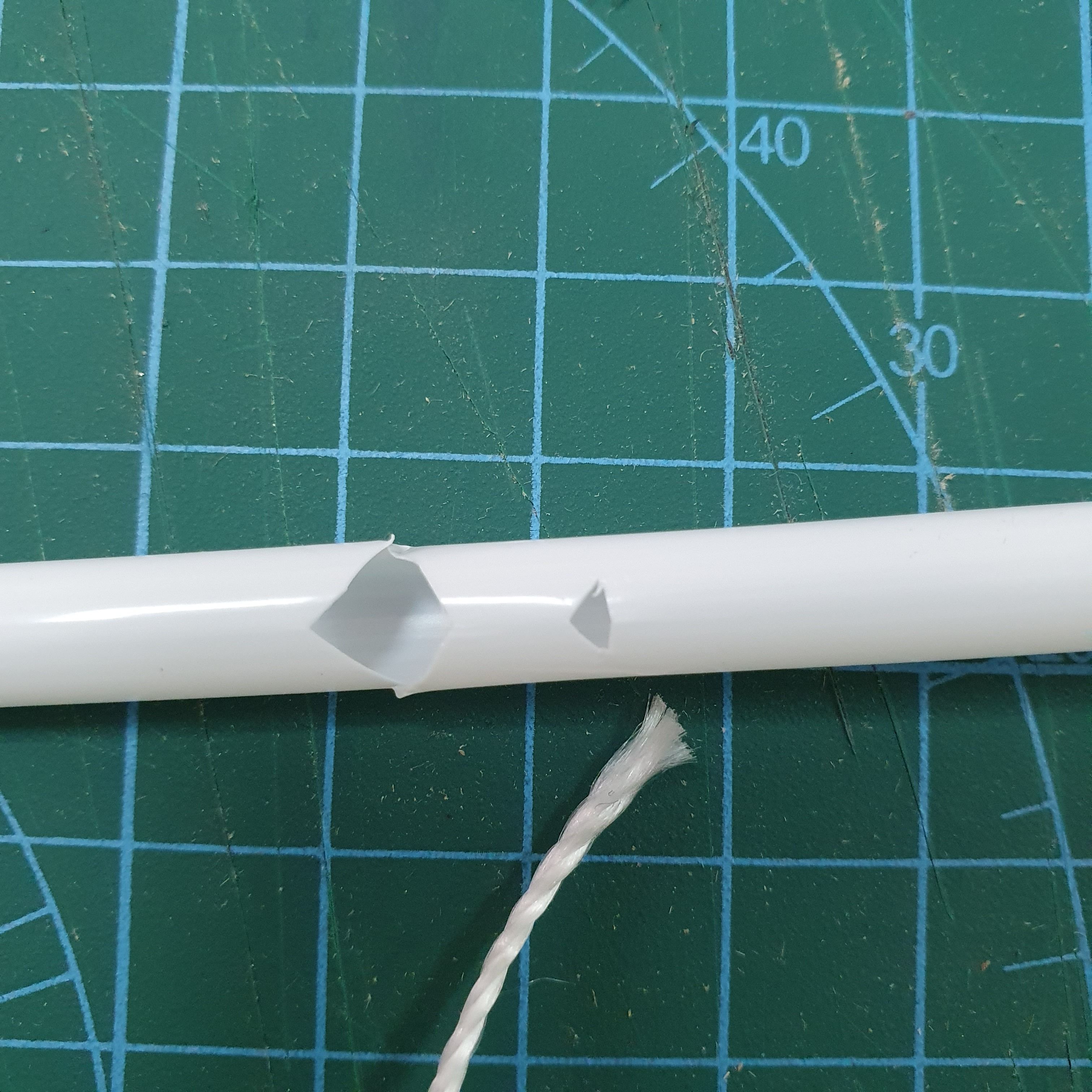
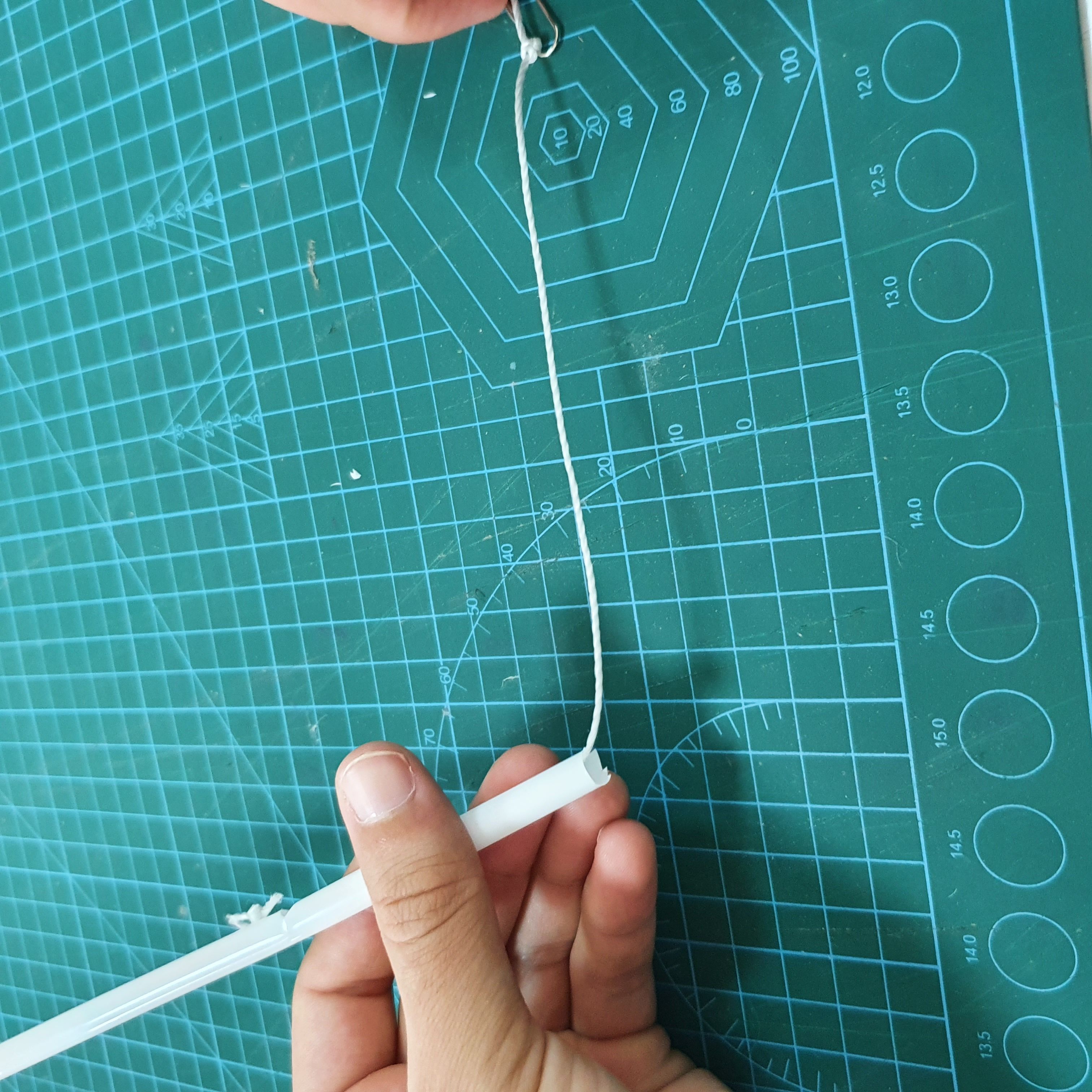
2. Make a small hole just above the notch, and thread the rope through the tube.

3. Tie a string over the hole in the straw and tie a paperclip to the other end.
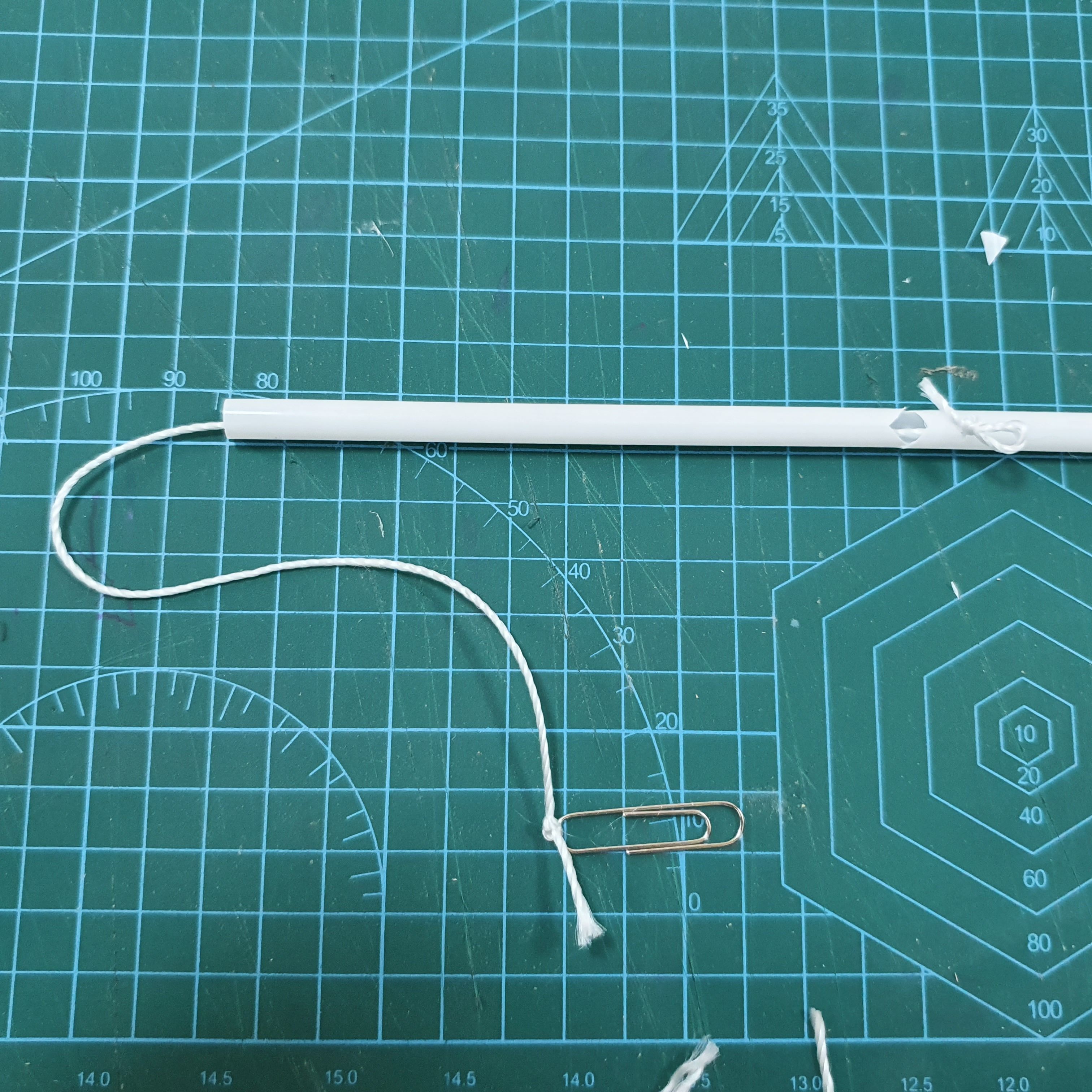
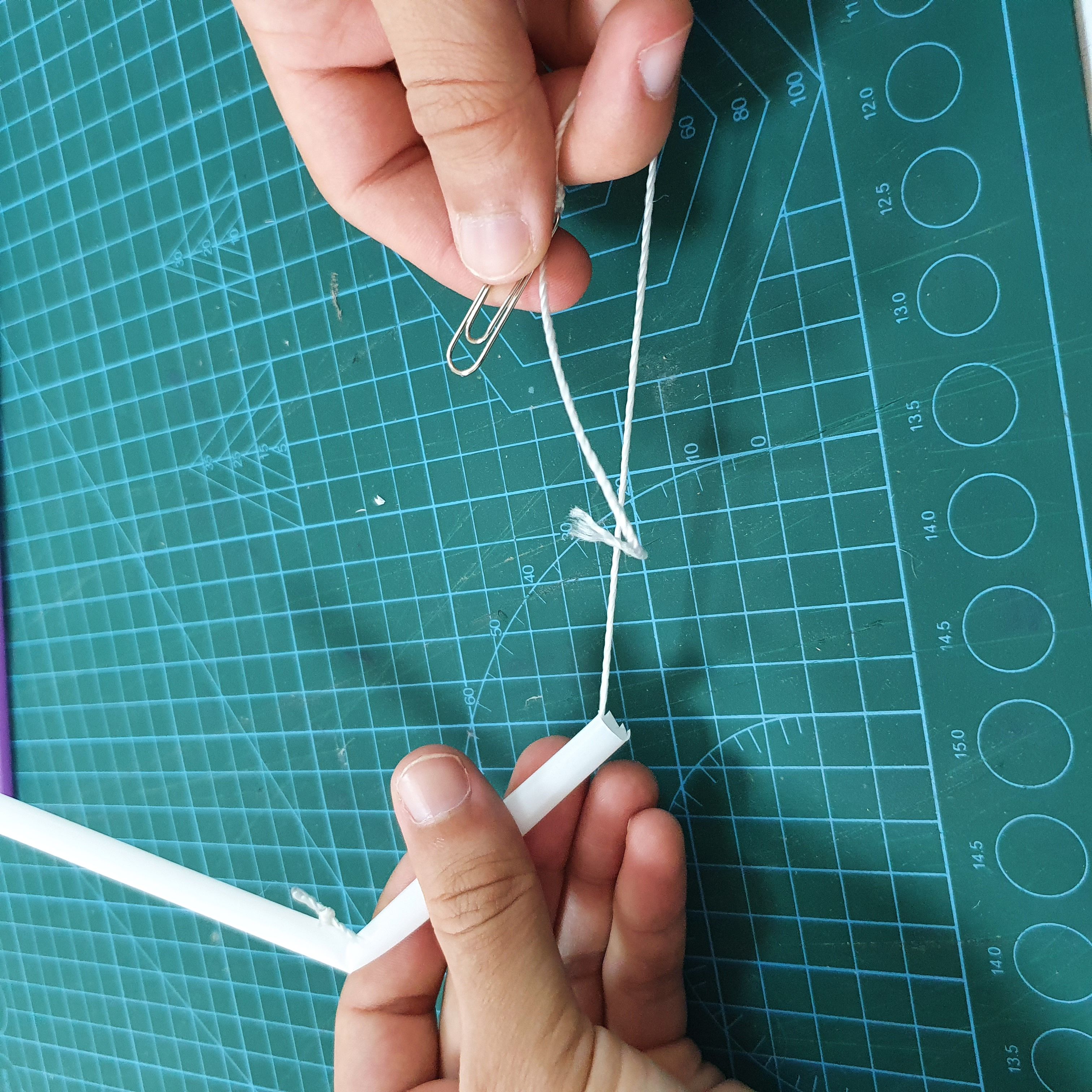
4. Hold the base of the straw with one hand and the paperclip with the other hand. When you pull on the paperclip, the straw should bend.
5. Make two more fingers in the same way as the first.
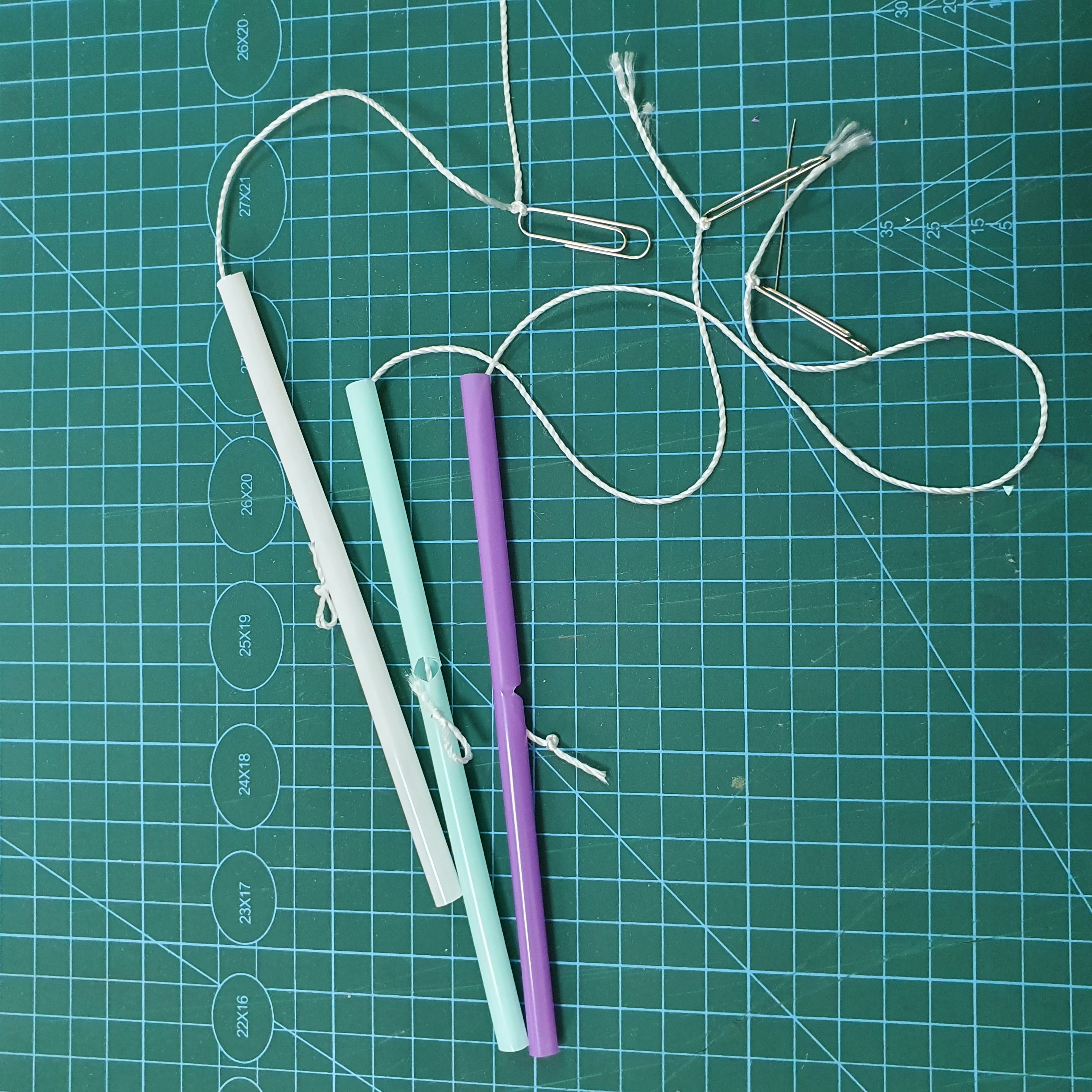
6. Form a plasticine palm around the base of the tubes. Make sure the notches on the straws are facing each other.
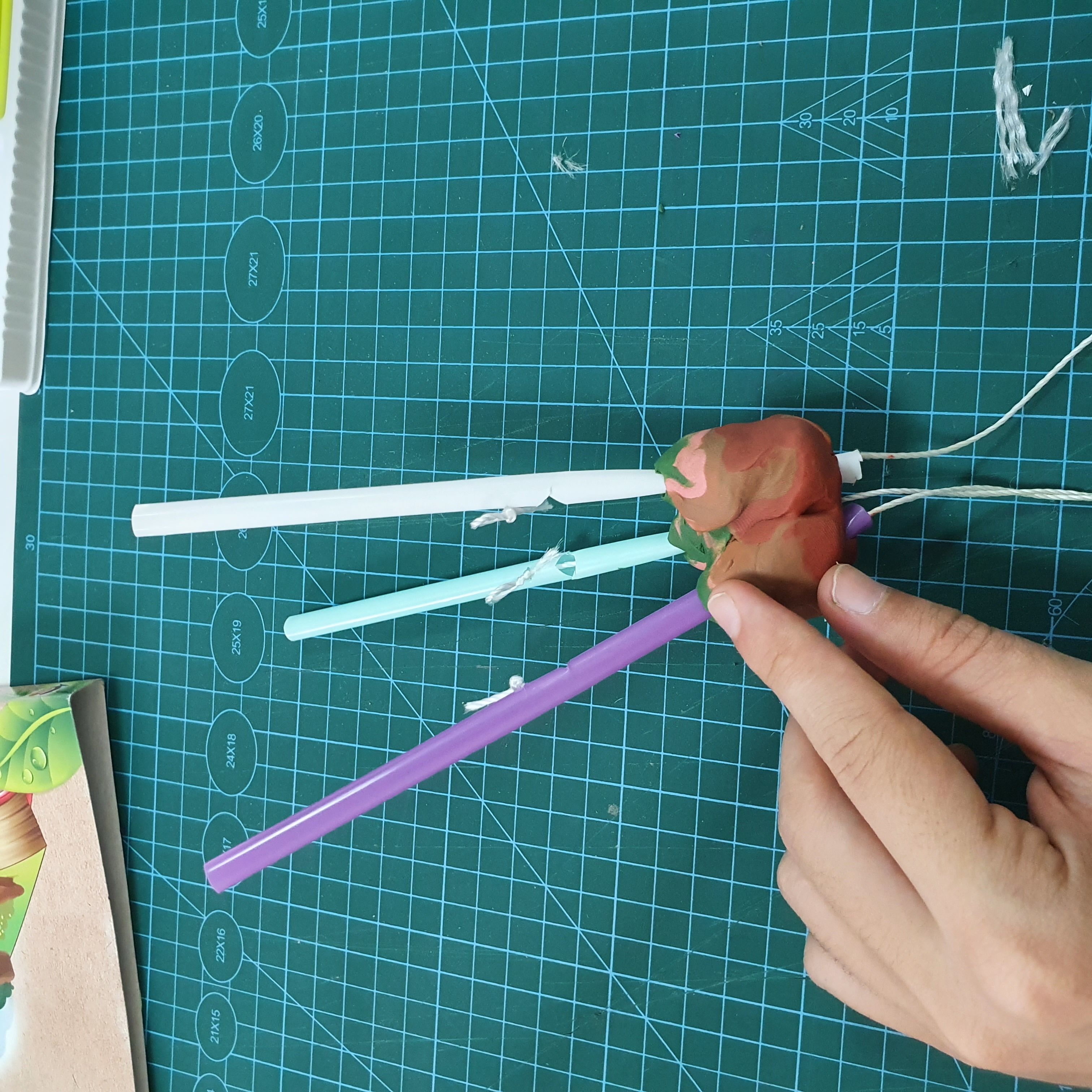
7. Hold the plasticine with one hand and the paper clips with the other hand. When you pull the paperclips, your fingers should bend.
8. Wrap the rubber bands around the straws. This can help improve their grip.
12. Cut out the cardboard, bend it into a tube and secure it with hot glue to make a tube. Attach plasticine to the end of the cardboard tube to form a “hand”. You may need to tie longer threads and thread them through the tube.
13. Now take the cardboard tube and pull on the string(s) to try and use your robotic arm to pick up small light objects.
You can try to make the finger harder. For example, fingers with several joints, each of which is independently controlled by a separate thread. You can make a hand with different combinations and orientations of the fingers and knuckles. Can you make a “claw”? How about a human hand with four fingers of different lengths and a thumb?
 Your arm is made up of bones, muscles, joints, and tendons. The bones provide the rigid structure of the hand, as do the straws in this project. The joints provide places to bend your fingers, like notches in your straws. The tendons pull on the joints, causing the various segments to bend like a string in your robotic arm. The work of the muscles in your hand is still provided by a human since ultimately it is you who pulls the paperclips. Real robotic arms have electric motors that act like muscles.
Your arm is made up of bones, muscles, joints, and tendons. The bones provide the rigid structure of the hand, as do the straws in this project. The joints provide places to bend your fingers, like notches in your straws. The tendons pull on the joints, causing the various segments to bend like a string in your robotic arm. The work of the muscles in your hand is still provided by a human since ultimately it is you who pulls the paperclips. Real robotic arms have electric motors that act like muscles.
Evaluation
PBL grading criterion:
Project-based learning is a learning method in which students acquire knowledge and skills by working on a single project to explore and find an answer to a genuine, interesting, and complex question, problem, or challenge.

