
2-урок
Ход практической работы
Шаг 1. Теперь собираем детали ручной модели, напечатанные на 3D принтере. Сначала отрегулируйте детали, как показано на рисунке 17.
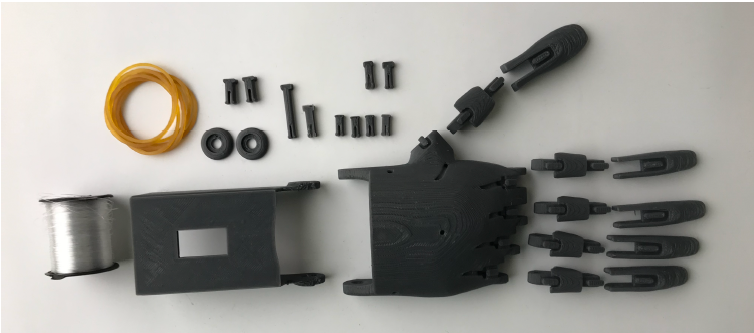
Рис.17. Детали модели правой руки
Шаг 2. Начнем сначала с сбора ладони и предплечья. Болт и шайбу закрепляем через отверстие в месте соединения ладони и запястья, аналогично гвоздю в верхней части модели руки, как показано на рисунке 17. Пример конкретного набора представлен на рис. 17.

Рис.17. Слияние ладони и кисти
Шаг 3. Собираем пальцы, используя именно подобные болты. Собираем все пальцы, как показано на рисунке 18. Двумя длинными пальцами 4, изображенными на рисунке 17 слева, являются указательный и средний пальцы.

Рис.18. Схема сбора пальцев рук
Шаг 4. собранные пальцы соединяем в ладони. Передний большой палец соединяем с ладонью, а указательный и средний пальцы фиксируем самым длинным болтом, остальные два пальца фиксируем последовательно, по отдельности болтами.
Шаг 5. Теперь для имитации мышц-антогонистов на внешней стороне пальцев соедините бугорки за пределами пальца резинкой.

Рис. 19. Антагонист «резинки»на пальцах
Шаг 6. А агонист прикрепляем мышцы к пальцу с помощью удилища (лески) и переносим из отверстий под пальцами за пределы ладони. Проведя ладонью по кисти, снимаем с кисти все нитки пальцев на 10 см с избытком.
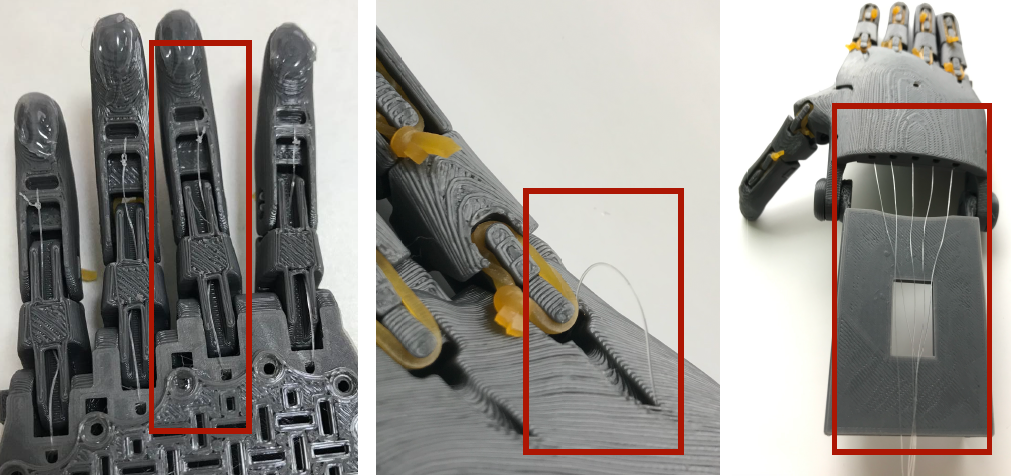
Рис. 20. Агонистические «резинки» на пальцах и их связки
Шаг 7. Теперь устанавливаем сервомотор, который крепим к отверстию в самой нижней части модели с помощью резинки из-под браслета. На белой ручке того же сервомотора нам нужно завязать нитки удилища. Сначала, сгибая пальцы, привязываем к сервомотору торчащие из него нитки удилища.
Рис. 21. Нитки сервомотора и приманки
Шаг 8. кнопка управления 1 через сервомотор сгибает и фиксирует пальцы. Для этого электрическая схема собрана, как показано на рисунке 22, и приведена
Код
#include <Servo.h>
Servo myservo;
#define CTS1Pin 2 // Pin for capactitive touch sensor 1
#define CTS2Pin 3 // Pin for capactitive touch sensor 2
int pos;
void setup()
{
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop()
{
int CTSValue1 = digitalRead(CTS1Pin);
int CTSValue2 = digitalRead(CTS2Pin);
if (CTSValue1 == HIGH)
{
for (pos = 0; pos <= 180; pos += 1)
myservo.write(pos);
delay(15);
}
if(CTSValue2==HIGH)
{
for (pos = 180; pos >= 0; pos -= 1)
myservo.write(pos);
delay(15);
}
Код ARDUINO записывается.
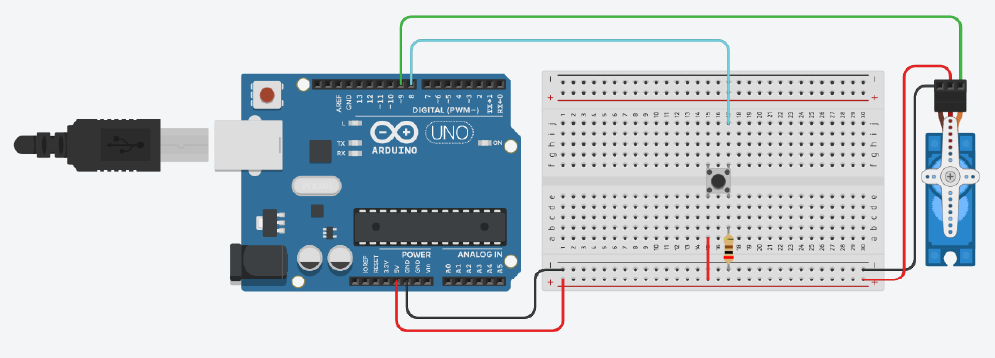
Рис. 22. Цепь, необходимая для сгибания и разгибания пальцев