
Урок 3
Создание телеграфа
На этом уроке учащиеся:
- создают телеграф для общения
- собирают схему подключения телеграфа
- собирают динамик для телеграфа
- пишут программу для отображения
Инструкция к сборке
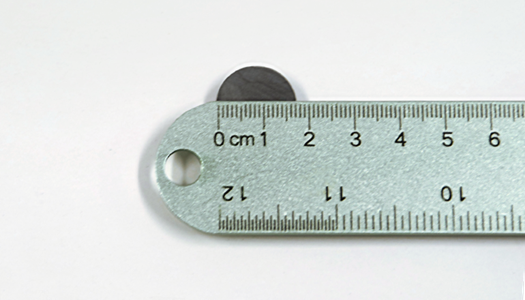
1 | Измерьте ширину вашего магнита.
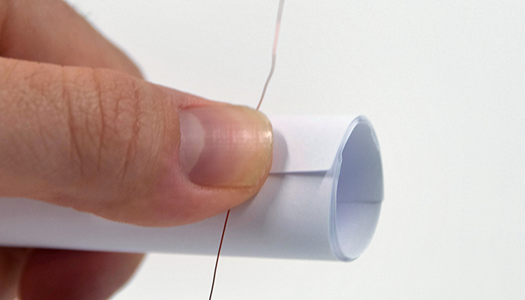
2 | Сверните лист бумаги так, чтобы он был немного шире магнита, и закрепите его скотчем. Это будет использоваться для намотки провода
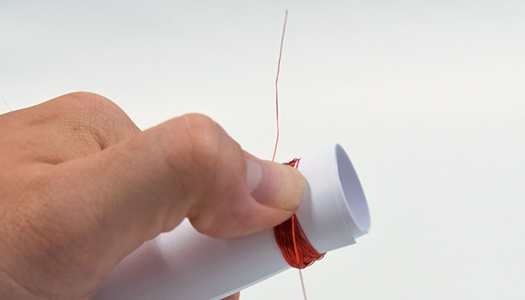
3 | Оставьте примерно 15 см проволоки в начале и намотайте проволоку примерно 50 раз. Чем больше накрутишь, тем громче динамик.
4 | Орамды аяқтағаннан кейін, сымды кесіңіз, екінші 6 дюймдік сымды соңында қалдырыңыз. Орамды түтіктен сырғытыңыз.
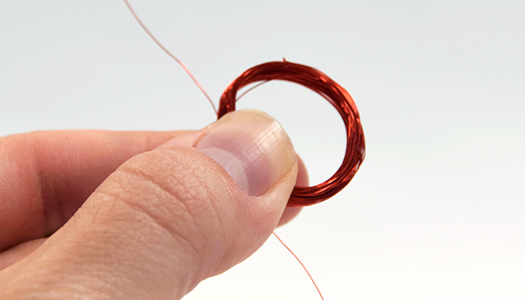
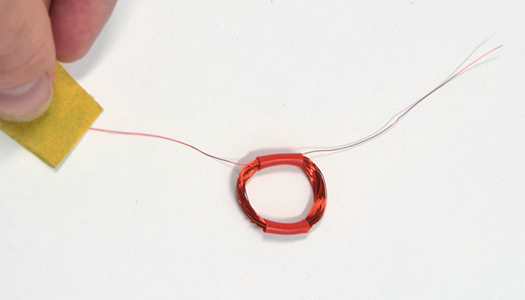
5 | Приклейте катушку клейкой лентой с противоположных сторон, затем аккуратно отшлифуйте концы проводов, сняв изоляцию.
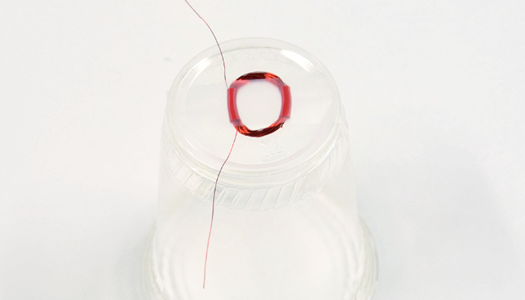
6 | Приклейте катушку ко дну чашки в центре.
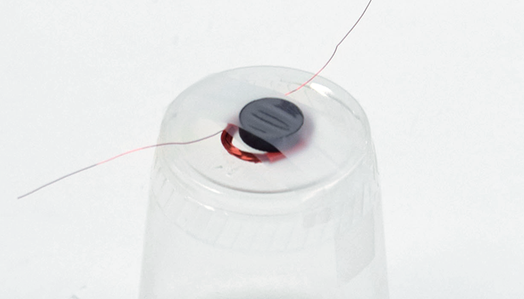
7 | Поместите магнит в центр катушки и закрепите его скотчем.
8 | Отсоедините зажимы типа «крокодил» от проводов электромагнита и прикрепите к проводам чашеобразного динамика.
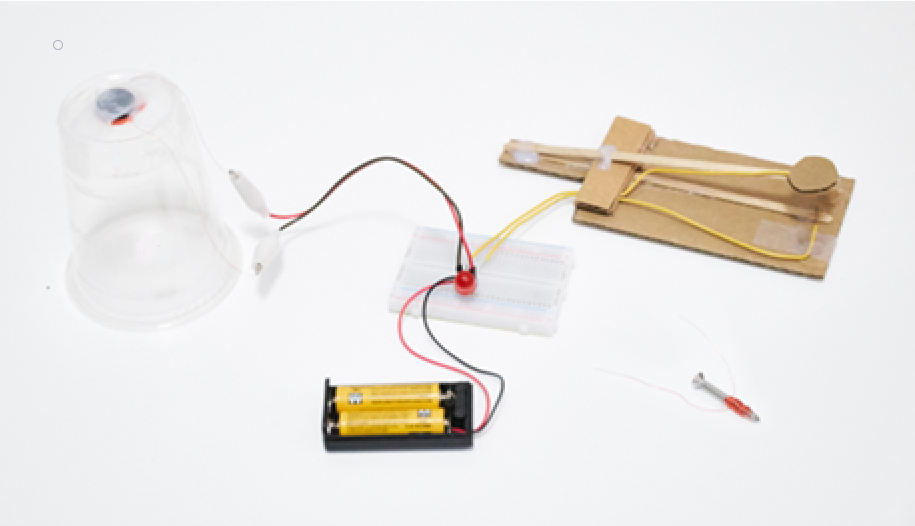
Отличная работа! Вы сделали динамик. Нажмите на выключатель, чтобы раздался щелчок. Поднесите динамик ближе к уху, если вы его не слышите.
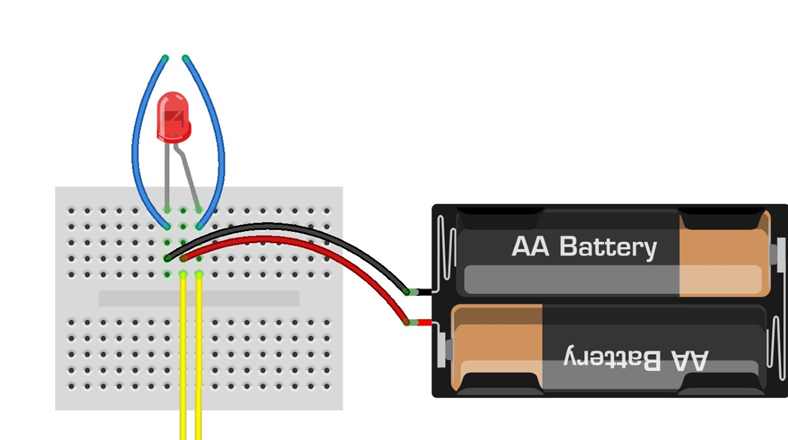
1 | Снимите светодиод и провода с переключателя прищепки и динамика с макетной платы. Вы будете повторно вставлять их в новые точки.
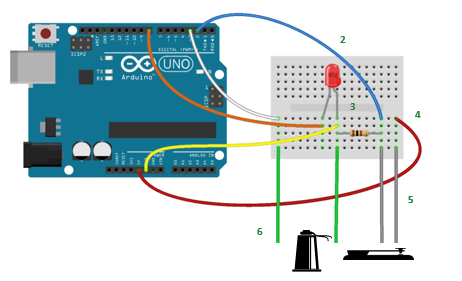
2 | Соедините Arduino Uno и макетную плату с помощью 5 перемычек, как показано на схеме. Цвет проводов полезен для организации, но не влияет на функциональность.
3 | Поместите светодиодную лампочку так, чтобы более длинная ножка (+) располагалась, как показано на схеме.
4 | Вставьте выводы резистора в макетную плату, как показано на рисунке.
5 | Подсоедините провода переключателя прищепки к макетной плате.
6 | Подсоедините динамик с пластиковой чашкой к макетной плате, вставив штыревые концы зажимов типа «крокодил», как показано на рисунке.
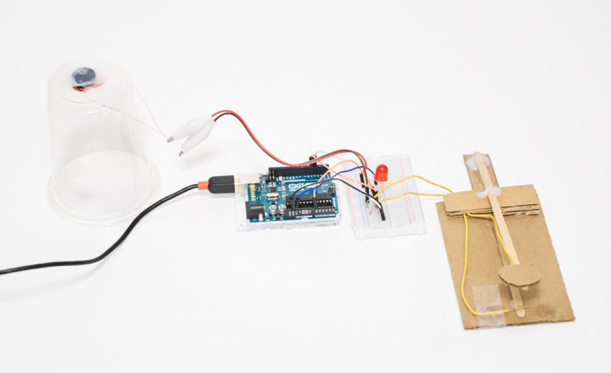
Отправьте азбуку Морзе своим телеграфом
Нажмите на выключатель. Вы увидите, как загорится светодиод, и услышите соответствующие звуки из динамика.
Поздравляем! Вы готовы визуализировать данные и общаться с помощью электричества!
Также необходимо написать программу для отображения данных с телеграфа
Необходимо использовать монитор порта для вывода данных
Так как здесь используется сложная библиотека для работы с азбукой Морзе, то код здесь просто предоставляется учащимся и загружается.
const String DELIMETER = ","; //Cordoba add-in expects a comma delimited string
const byte ledPin = 8; //LED output pin
const byte keyPin = 2; //telegraph key input pin
const byte speakerPin = 3; //cup speaker output pin
/*
* Telegraph key state (0=off, 1=on)
*/
byte keyState = 0;
/*
* The timing of dots and dashes and spaces are very strict in the Morse Code specification.
* The following values are the actual values:
*/
int wpm = 10; //words per minute - inidicates Morse Code speed
int unit = 1200/wpm; //Time = 1200/wpm = unit in milliseconds
int dotTime = unit; //dot mark duration
int dashTime = unit * 3; //dash mark duration
int markSpace = unit; //duration between marks
int signalSpace = unit * 3; //duration between letters
int wordSpace = unit * 7; //duration between words
/*
* For practical purposes a range is going to give better results than specific timings.
* The following values are used in place of the strict values above.
* Play around with the values below to get the best results.
*/
int dotMin = dotTime/4;
int dotMax = dashTime/2;
int dashMin = dotMax;
int dashMax = dashTime+(dotTime*2);
int signalSpaceMin = signalSpace*2;
int signalSpaceMax = wordSpace*2;
int wordSpaceMin = signalSpaceMax;
/*
* Timestamps and intervals used to determine duration of marks and spaces
*/
unsigned long currentTime = 0; //current timestamp
unsigned long markTime = 0; //start of a positive signal (dot or dash)
unsigned long spaceTime = 0; //start of absence of signal (space)
unsigned long markInterval = 0; //time interval for a mark
unsigned long spaceInterval = 0; //time interval for a space/pause
/*
* Program control variables to determine markTime and spaceTime processing
*/
bool startMark = 0; //boolean to indicate a current signal
bool gotMark = 0; //indicates that we got a mark and can now process markTime
bool startSpace = 0; //boolean to indicate a current pause
bool gotSpace = 0; //indicates that we got a pause and can now process spaceTime
bool firstMark = 0; //boolean to indicate that an intitial mark has been processed so we can now add space(s)
/*
* Incoming serial data variables
*/
String mInputString = ""; // string variable to hold incoming data
boolean mStringComplete = false; // variable to indicate mInputString is complete (newline found)
int mSerial_Interval = 75; // Time interval between serial writes
unsigned long mSerial_PreviousTime = millis(); // Timestamp to track serial interval
/*
* Variables sent to Excel
*/
String morseMessage = ""; //variable to hold our signal marks and spaces
const int charLimit = 20; //morseMessage character limit
byte charCount = 0; //number of marks and spaces in morseMessage
String signalArray[charLimit]; //array of signals sent from Excel
/*
* Variables sent from Excel
*/
int serialMode = 0; //1=Receive from Excel 0=Send to Excel
int receiveMessage = 0; //Process incoming Morse Code message from Excel
int clearMessage = 0; //Clear morseMessage
/*
* setup()
*
* Initializations for Serial, input and output pins, and reserve space for morseMessage
*/
void setup()
{
Serial.begin(9600); //Initialize Serial communications
pinMode(ledPin, OUTPUT); //Initialize LED output pin
pinMode(speakerPin, OUTPUT); //Initialize cup speaker output pin
pinMode(keyPin, INPUT); //Initialize telegraph key input pin
morseMessage.reserve(200); //reserve 200 bytes to avoid memory fragmentation issues
}
/*
* loop()
*
* This is the main loop that determines program flow.
*/
void loop()
{
processIncomingSerial(); //process program control variables and messages from Excel
if(serialMode==0)
{ //SEND TO EXCEL (decode in Excel)==============================
encodeOutgoingMorseCode(); //encode telegraph signals into Morse Code to send to Excel
} else { //RECEIVE FROM EXCEL (encode in Excel)=========================
decodeIncomingMorseCode(); //decode Morse signals into LED flashes and speaker tones
}
//send outgoing serial when we have a mark or space to send
if(gotMark) //if we have a mark
{
processOutgoingSerial(); //send to serial
gotMark = 0; //reset for new mark
}
if(gotSpace) //if we have a space
{
processOutgoingSerial(); //send to serial
gotSpace = 0; //reset for new space
}
}
/* ENCODE OUTGOING MORSE CODE /*
* encodeOutgoingMorseCode()
*
* Encodes telegraph key presses and the pauses in between into a series of marks and spaces.
* Spaces are processed while a signal is being received, marks are processed during pauses.
*
* 1. If received from Excel then Clear morseMessage
*
* 2. Determine keyState
* HIGH
* -turn on LED and Speaker for audio-visual indication of a key press
* -start a new mark (set markTime timestamp)
* -process previous pause (processSpaceTime)
*
* LOW
* -turn off LED and Speaker for audio-visual indication of a pause
* -start a new space (set spaceTime timestamp)
* -process previous mark (processMarkTime)
*
* 3. If there was a valid mark or pause the updated morseMessage is sent to Excel.
*
*/
void encodeOutgoingMorseCode()
{
if(clearMessage){
clearMorseMessage(); //clears morseMessage string variable
}
keyState = digitalRead(keyPin); //read the telegraph key state
currentTime = millis(); //set the main timestamp
//when the key is pressed (mark)
if(keyState==HIGH)
{
digitalWrite(ledPin, HIGH); //turn on LED
tone(speakerPin, 800, 100); //send tone to speaker
if(!startMark) //start of a new mark
{
markTime = currentTime; //set markTime timestamp
startMark = 1; //we are tracking a mark
}
if(charCount < charLimit) //if we have more characters left then
{
processSpaceTime(); //encode the duration of time between key presses
}
}
//when the key is not pressed (pause/space)
if(keyState==LOW)
{
digitalWrite(ledPin, LOW); //turn off LED
if(!startSpace) //start of new space
{
spaceTime = currentTime; //set spaceTime timestamp
startSpace = 1; //we are tracking a space
}
if(charCount < charLimit) //if we have more characters left then
{
processMarkTime(); //encode the duration of time during key presses
}
}
}
/*
* processMarkTime()
*
* This method determines the time interval that the telegraph key was pressed down and then
* encodes this duration into a Morse Code mark (dot or dash).
*/
void processMarkTime()
{
if(startMark) { //if markTime has been set
if(firstMark==0) //if there are no marks yet morseMessage is cleared
{
clearMorseMessage();
}
markInterval = currentTime - markTime; //get the markInterval and
if(markInterval > dotMin) //if greater than dotMin
{
if(markInterval < dotMax) //and less than dotMax
{
morseMessage += "."; //it's a dot
}
}
if(markInterval > dashMin) //if greater than dashMin
{
if(markInterval < dashMax) //and less than dashMax
{
morseMessage += "-"; //it's a dash
}
}
startMark = 0; //stop processing markTime
gotMark = 1; //either we got a mark or was too short/long so reset
firstMark = 1; //prevents any space before initial mark
}
}
/*
* processSpaceTime()
*
* This method determines the time interval that the telegraph key was pressed down and then
* encodes this pause into a space between signals or a space between words.
*/
void processSpaceTime()
{
if(firstMark){ //only process spaceTime after receiving an initial mark
if(startSpace){ //if spaceTime has been set
spaceInterval = currentTime - spaceTime; //get the spaceInterval
if(spaceInterval > signalSpaceMin) //if greater than signalMin
{
if(spaceInterval < signalSpaceMax) //and less than signalMax
{
morseMessage += ","; //we have a new signal and need a new column in the serial message
charCount++; //increment character count
}
}
if(spaceInterval > wordSpaceMin) //anything greater than wordSpaceMin and
{
morseMessage += ", ,"; //we have a new word and need an empty column in the serial message
charCount = charCount + 2; //increment character count
}
startSpace = 0; //stop processing spaceTime
gotSpace = 1; //we got a new signal space or nothing
}
}else{
spaceTime = currentTime; //reset spaceTime
}
}
void clearMorseMessage()
{
morseMessage = " , , , , , , , , , , , , , , , , , , ,"; //send all empty characters to refresh cordoba data
sendDataToSerial(); //send directly to serial
morseMessage = ""; //reset to empty string
charCount = 0; //reset character count
clearMessage = 0; //reset clearMessage
firstMark = 0; //reset firstMark
}
/*
* ==========================================================================================================
* DECODE INCOMING MORSE CODE ===============================================================================
* ==========================================================================================================
*/
/*
* decodeIncomingMorseCode()
*
* Decodes incoming Morse Code into LED and speaker output.
*
* If a receiveMessage command is received from Excel:
* 1. Loops through each Morse Code signal in signalArray[]
* 2. Loops through each character
* 3. Determines mark or space and outputs LED and Speaker accordingly
*
*/
void decodeIncomingMorseCode()
{
if(receiveMessage) //if we have a new message trigger from Excel
{
bool previousSpace = 0; //prevents waiting for empty signals to process
for(int c=0; c<charLimit; c++) //loop through signalArray
{
String morseCode = signalArray[c]; //get character from signalArray
for(int m=0; m<morseCode.length(); m++) //loop through each mark of each character
{
String mark = morseCode.substring(m, m+1); //get mark
//Interrupt so that switching modes can happen during decoding
processIncomingSerial(); //check incoming serial
if(serialMode==0) //if the mode has changed to 0
{ //then, to break out of loop
c=charLimit; //set c to maximum
m=c; //set m to maximum
}
//decode each mark
if(mark==".") //we have a dot
{
digitalWrite(ledPin, HIGH); //turn on LED
tone(speakerPin, 800, dotTime); //send tone to speaker
delay(dotTime); //delay for duration of dotTime
digitalWrite(ledPin, LOW); //turn off LED
delay(markSpace); //delay for a pause between marks
previousSpace = 0;
}
if(mark=="-") //we have a dash
{
digitalWrite(ledPin, HIGH); //turn on LED
tone(speakerPin, 800, dashTime); //send tone to speaker
delay(dashTime); //delay for duration of dashTime
digitalWrite(ledPin, LOW); //turn off LED
delay(markSpace); //delay for a pause between marks
previousSpace = 0;
}
if(mark==" ") //we have a space
{
if(previousSpace==0) //if the last mark was not a space
{
delay(wordSpace); //add pause of wordSpace
previousSpace = 1; //indicates last mark was a space
}
}
}
if(previousSpace==0) //if the last mark was not a spac
{
delay(signalSpace); //add pause of signalSpace duration after each character
}
}
receiveMessage = 0; //reset message trigger (from Excel)
}
}
/*
* -------------------------------------------------------------------------------------------------------
* INCOMING SERIAL DATA FROM EXCEL PROCESSING CODE--------------------------------------------------------
* -------------------------------------------------------------------------------------------------------
*/
void processIncomingSerial()
{
getSerialData();
parseSerialData();
}
/*
* getSerialData()
*
* Gathers bits from serial port to build mInputString
*/
void getSerialData()
{
while (Serial.available()) {
char inChar = (char)Serial.read(); // get new byte
mInputString += inChar; // add it to input string
if (inChar == '\n') { // if we get a newline...
mStringComplete = true; // we have a complete string of data to process
}
}
}
/*
* parseSerialData()
*
* Parse all program control variables and data from Excel
*/
void parseSerialData()
{
if (mStringComplete) { // process data from mInputString to set program variables.
//set variables using: var = getValue(mInputString, ',', index).toInt(); // see getValue function below
serialMode = getValue(mInputString, ',', 0).toInt(); //Data Out worksheet cell A5
receiveMessage = getValue(mInputString, ',', 1).toInt(); //Data Out worksheet cell B5
clearMessage = getValue(mInputString, ',', 2).toInt(); //Data Out worksheet cell C5
for(int i=0; i<charLimit; i++)
{
String data = getValue(mInputString, ',', i+3);
if(data=="") //if we get an empty string
{
signalArray[i] = " "; //add a space to the array
}else{
signalArray[i] = data; //otherwise add the data string
}
}
mInputString = ""; // reset mInputString
mStringComplete = false; // reset stringComplete flag
}
}
/*
* getValue()
*
* Gets value from mInputString using an index. Each comma delimited value in mInputString
* is counted and the value of the matching index is returned.
*/
String getValue(String mDataString, char separator, int index)
{
// mDataString is mInputString, separator is a comma, index is where we want to look in the data 'array'
int matchingIndex = 0;
int strIndex[] = {0, -1};
int maxIndex = mDataString.length()-1;
for(int i=0; i<=maxIndex && matchingIndex<=index; i++){ // loop until end of array or until we find a match
if(mDataString.charAt(i)==separator || i==maxIndex){ // if we hit a comma OR we are at the end of the array
matchingIndex++; // increment matchingIndex to keep track of where we have looked
strIndex[0] = strIndex[1]+1; // increment first substring index
// ternary operator in objective c - [condition] ? [true expression] : [false expression]
strIndex[1] = (i == maxIndex) ? i+1 : i; // set second substring index
}
}
return matchingIndex>index ? mDataString.substring(strIndex[0], strIndex[1]) : ""; // if match return substring or ""
}
/*
* -------------------------------------------------------------------------------------------------------
* OUTGOING SERIAL DATA TO EXCEL PROCESSING CODE----------------------------------------------------------
* -------------------------------------------------------------------------------------------------------
*/
/*
* processOutgoingSerial()
*
* Processes outgoing data once every mSerial_Interval
*/
void processOutgoingSerial()
{
if((millis() - mSerial_PreviousTime) > mSerial_Interval){ // Enter into this only when interval has elapsed
mSerial_PreviousTime = millis(); // Reset serial interval timestamp
sendDataToSerial();
}
}
/*
* sendDataToSerial()
*
* Sends morseMessage to Excel
*/
void sendDataToSerial()
{
Serial.print(morseMessage);
Serial.println(); //send line ending to complete serial message
}