2-сабақ
Ақылды қақпа жүйесі
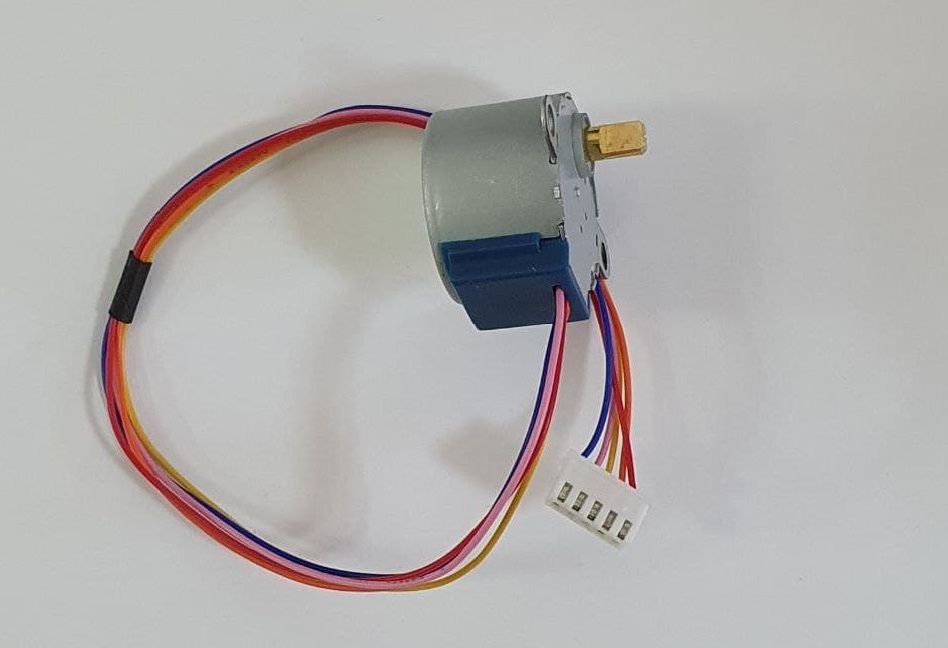
Бұл сабақта біз ақылды гараж есігін жинаймыз. Ол үшін бізге қадамдық қозғалтқыш қажет. Қадамдық қозғалтқыш объектіні белгілі бір қадамдар санына дәл айналдыруға арналған. Драйвердің көмегімен Arduino қадамдық қозғалтқышты басқарады. Ал Arduino IDE бағдарламасында қадамдар санын орнатамыз.
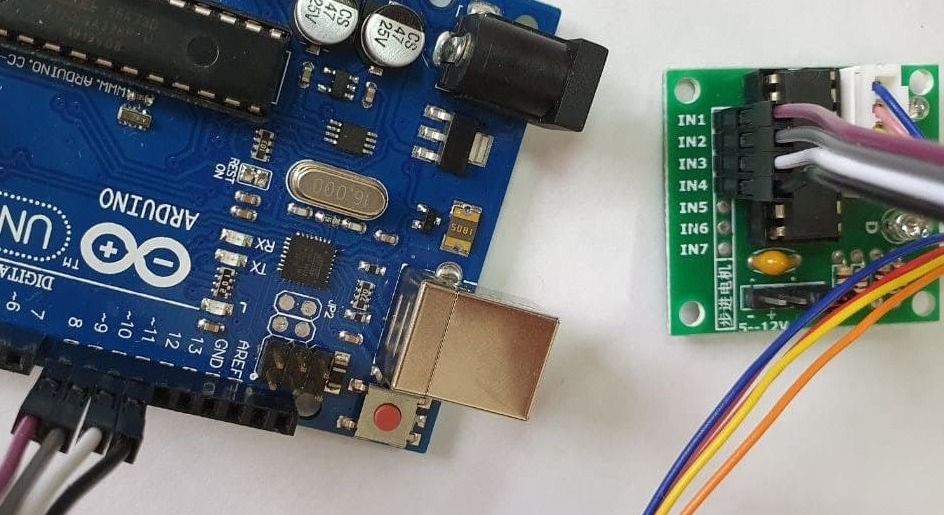
Драйвер арқылы Arduino Uno-ға қадамдық қозғалтқышты қосу схемасы төмендегі суретте көрсетілген.
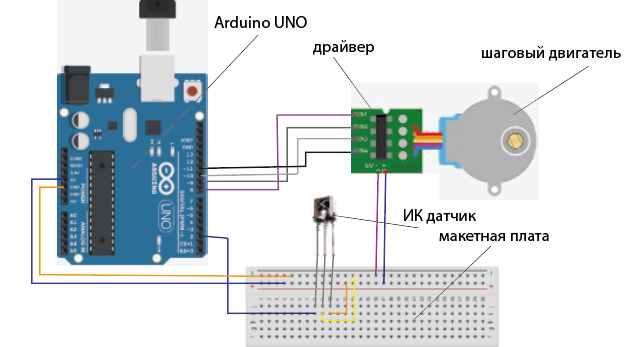
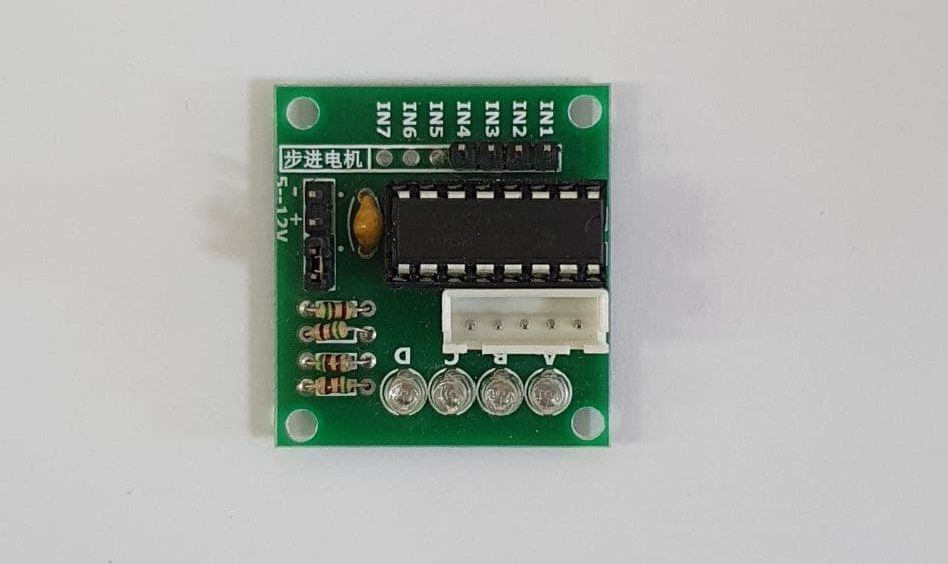
1. Драйвер порттарын суретте көрсетілгендей Arduino UNO-ға қосыңыз.
N1 → 8; N2 → 9; N3 → 10; N4 → 11.
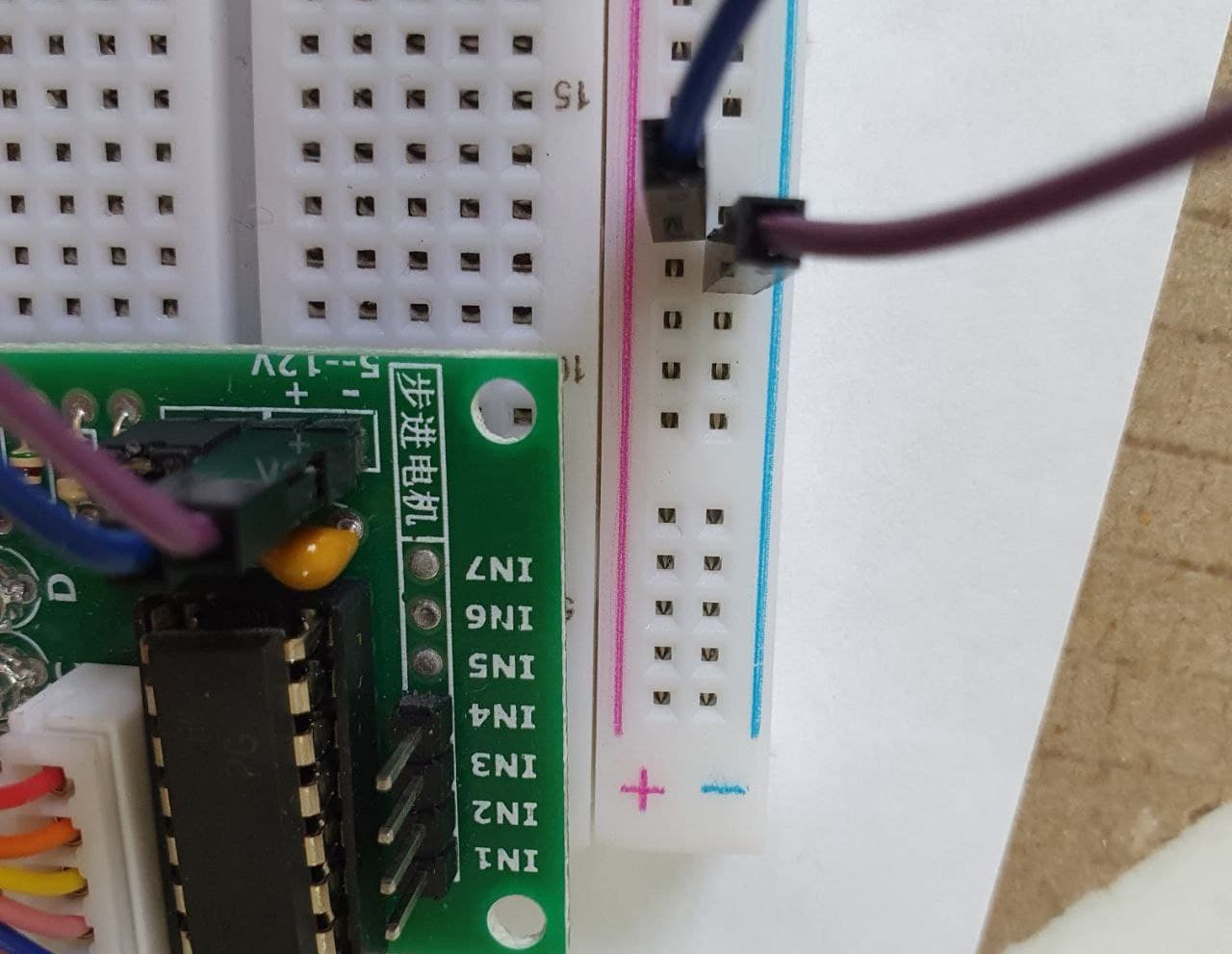
2. Қозғалтқыш драйверін макет тақтасына орнатыңыз, ол үшін:
драйверде «+» (плюсті) макет тақтасында «+» (плюске) жалғаймыз.
драйверде » — «(минусті) макет тақтасында » — » (минуске) жалғаймыз.
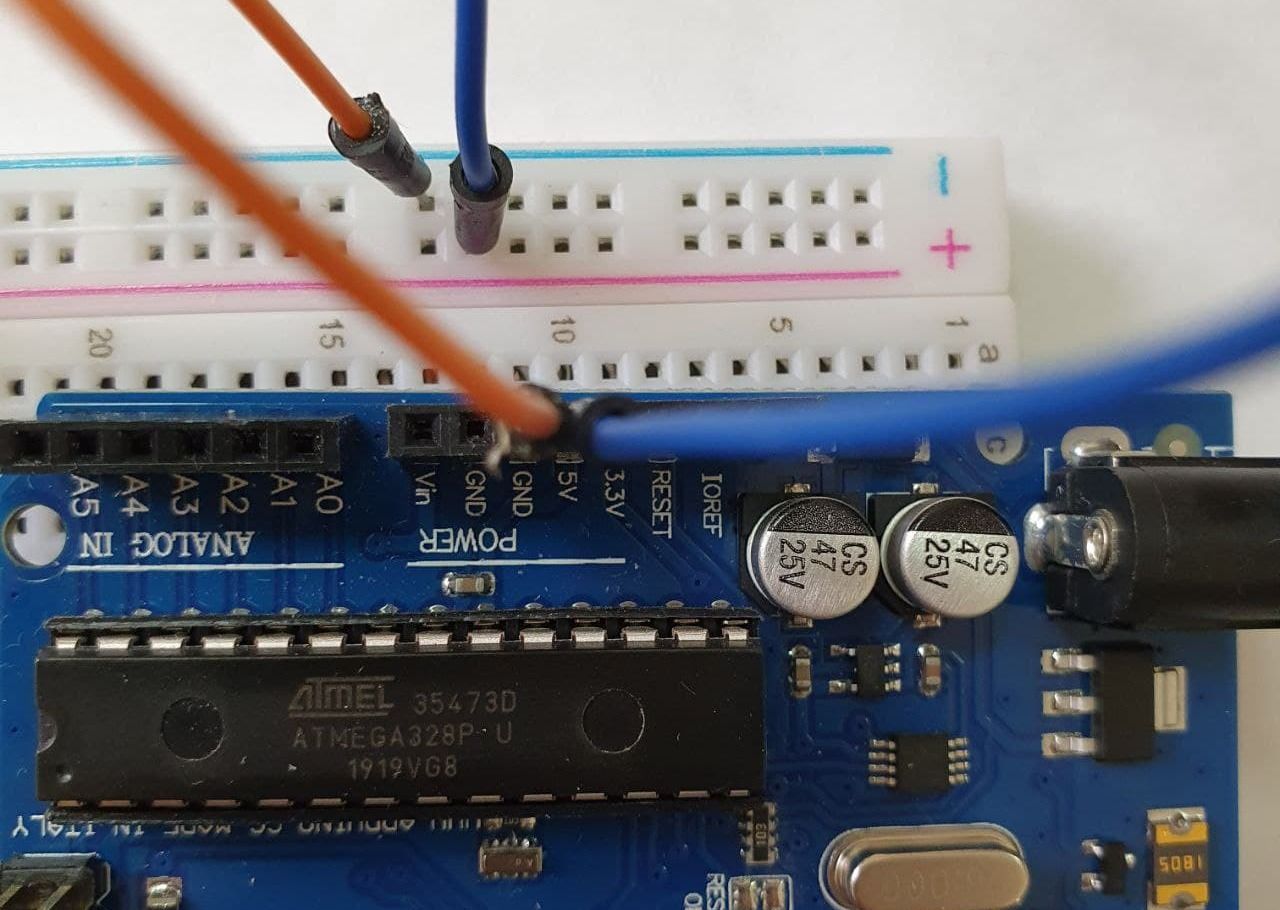
3. Енді Arduino-дан макет тақтасына сымдарды тартамыз.
GND → «-«; 5V → «+».
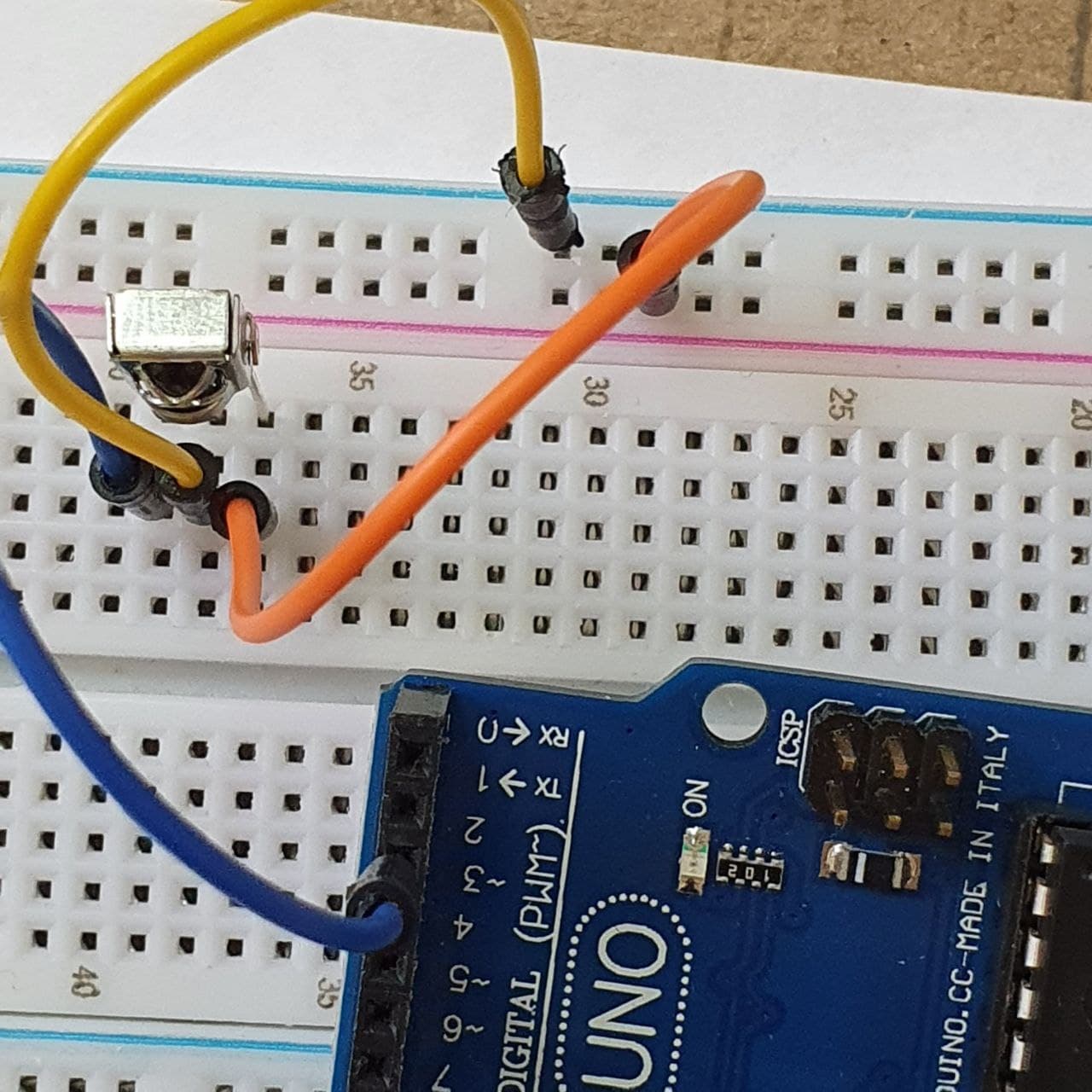
4. Енді макет тақтасына ИҚ сенсорын орнатамыз. Сенсордың үш аяғы бар.
Оң жақтағы біріншісі «-» (бірінші аяғымен бір қатардағы байланыс);
екіншісі «+» ;
үшіншісі Arduino UNO-дағы «2» (суреттегідей).
Барлығы схемадағыдай дұрыс қосылған кезде, Arduino IDE бағдарламасын ашыңыз.
- Егер компьютеріңізде Arduino IDE бағдарламасы болмаса, оны видеоға қарап орнатыңыз.

- Arduino-IRemote-master и Stepper Ардуино кітапханалары бар архивті жүтеп алыңыз, архивтан шығарып, Ардуино кітапханалары орналасқан пакіні C:Program Files (x86)Arduinolibraries бойынша орналастырыңыз. Бұны қалай істетінін видеодан қараңыз.

- Содан кейін төмендегі скетчті көшіріп, бағдарлама терезесіне қойыңыз. Егер қателер болмаса, «тексеру» түймесін, кейін «жүктеу» түймесін басыңыз. Arduino UNO құрылғысын таңдаңыз, бірнеше секундтан кейін құрылғының жұмысын тексеруге болады. Пульттегі + және — батырмаларын басып қараңыз. Қозғалтқыш білігі әртүрлі бағытта айналуы керек.
- Скетчте қозғалтқыштың қадам санын өзгертуге болады. Тек кодтағы санды өзгертсеңіз болғаны.
- Arduino IDE-де скетчті қалай жүктеуге болатындығы туралы бейне нұсқаулықты қараңыз.
#include <IRremote.h> // библиотеканы қосамыз
#include <Stepper.h> // қадамдық қозғалтқыш библиотекасы
int RECV_PIN = 2; // сигналдық пинді 8-ші санд. шығуға қосамыз
IRrecv irrecv(RECV_PIN);
decode_results results;
const int stepsPerRevolution = 40; // айналымға сәйкес қадам саны, сіздің қозғалтқышқа сай өзгертіңіз
Stepper myStepper(stepsPerRevolution, 8, 10, 9, 11);
void setup()
{
Serial.begin(9600); // serial ашу
myStepper.setSpeed(130); // 130 айн/мин жылдамдығын орнатамыз
irrecv.enableIRIn(); // ИК-қабылдағышын енгізу
}
void loop()
{
delay(500);
if (irrecv.decode(&results)) {
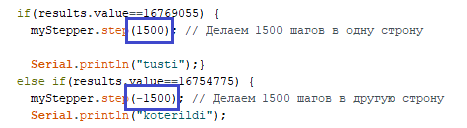
if(results.value==16769055) {
myStepper.step(1500); // Бір бағытта 1500 қадам
Serial.println("tusti");}
else if(results.value==16754775) {
myStepper.step(-1500); // Кері бағытта 1500 қадам
Serial.println("koterildi");
}
Serial.println(results.value, DEC); // шығу 16-шы режімде
Serial.println(); // ыңғайлы болу үшін бос жол қалдырамыз
irrecv.resume(); // келесі мәндерді аламыз
}
}
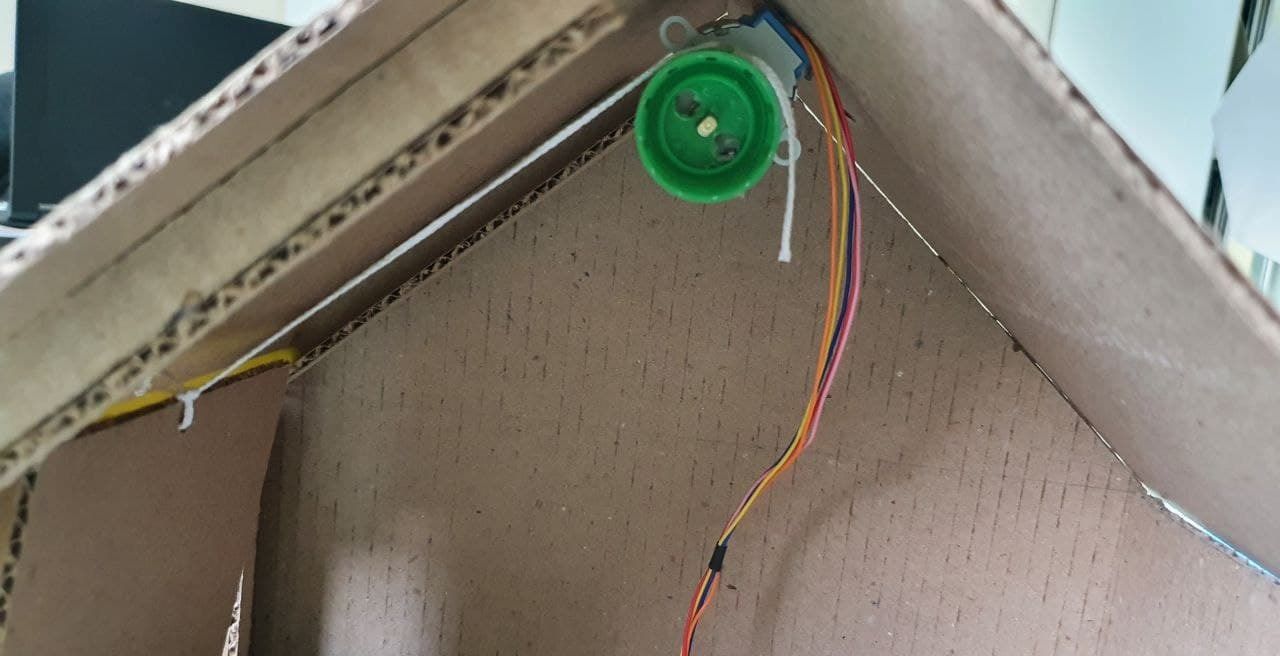
Бәрі жұмыс істеп, қашықтан басқару пультіндегі батырмаларды басқан кезде білік айналатын болса, айналған кезде қақпа ашылатындай етіп қозғалтқышты гаражға орнатамыз. Біздің жағдайда, бөтелке қақпағында біліктің өлшеміне сәйкес тесік жасаймыз, қақпақ білікте берік тұруы керек. Қақпа жібінің екінші ұшын қақпаққа жабыстырамыз. Енді қозғалтқышты гараждың төбесіне орнатамыз.