
2-сабақ
Тəжірибелік жұмыс барысы
1. Енді 3D принтерде басылып шыққан қол моделінің бөлшектерін жинаймыз. Алдымен 16-суретте көрсетілгендей бөлшектерді реттеп алыңыз.
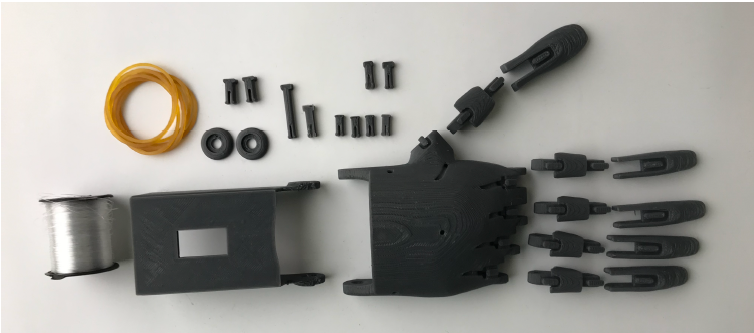
16-сурет. Оң қол моделінің бөлшектері
2. Алдымен алақан мен білекті жинаудан бастаймыз. 16-суретте көрсетілгендей қол моделінің үстіңгі бөлігіндегі шегеге ұқсас болт пен шайбаны алақан мен білезік қосылатын жердегі тесік арқылы бекітеміз. Нақты жинақ үлгісі 17-суретте көрсетілген.

17-сурет. Алақан мен білезіктің бірігуі
3. Тура осыған ұқсас болттарды қолдану арқылы саусақтарды жинаймыз. 18-суретте көрсетілгендей барлық саусақтарды жинаймыз. 17-суреттің сол жағында көрсетілген 4 саусақтың екі ұзыны сұқ саусақ пен ортаңғы саусақ болып табылады.

18-сурет. Қол саусақтарын жинау үлгісі
4. Жиналған саусақтарды алақанға біріктіреміз. Алдыңғы бас бармақты алақанның жанынан біріктреміз, ал сұқ саусақ пен ортаңғы саусақты ең ұзын болтпен бекітсек,қалған екі саусақты ретімен, жеке-жеке болттармен бекітеміз.
5.Енді саусақтардың сыртқы жағындағы антогонист бұлшықеттерді имитациялау үшін саусақтың сыртындағы төмпешіктерді резинамен қосып байлаңыз.

19-сурет. Саусақтардағы антагонист «резеңкелер»
6. Ал агонист бұлшықеттерді қармақ бауын (леска) қолданып саусаққа байлаймыз да, саусақтардың астындағы тесіктерден алақанның сыртына өткіземіз. Алақаннан білезікке өткізіп болған соң, білезікте барлық саусақтың қармақ жіптерін артығымен 10 см алып ұшын қиямыз.
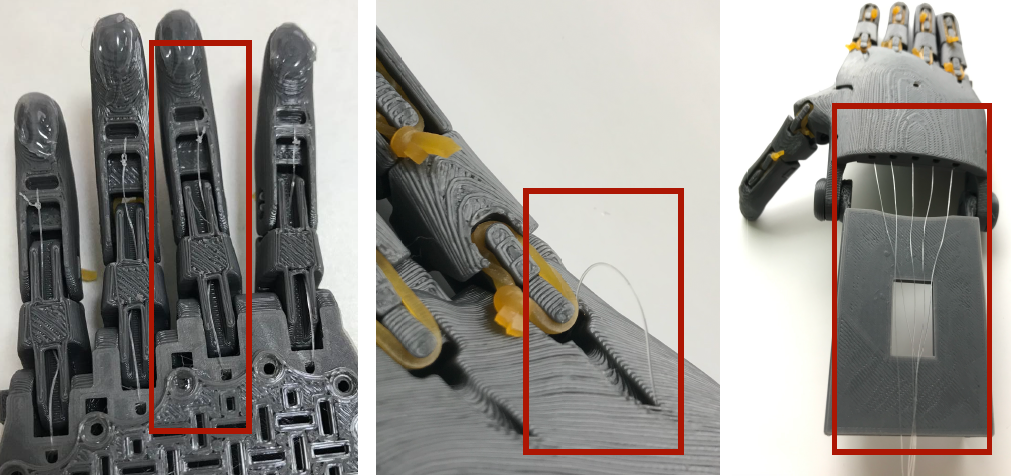
20-сурет. Саусақтардағы агонист «резеңкелер» мен олардың байламдары
7. Енді сервомоторды орнатамыз, оны модельдің ең төменгі бөлігіндегі тесікке білезіктің астынан резеңкені қолданып байлап орнатамыз. Сол сервомотордың ақ тұтқасына қармақ жіптерін байлауымыз керек. Алдымен саусақтарды бүккен бойы одан шыққан қармақ жіптерін сервомоторға байлаймыз.
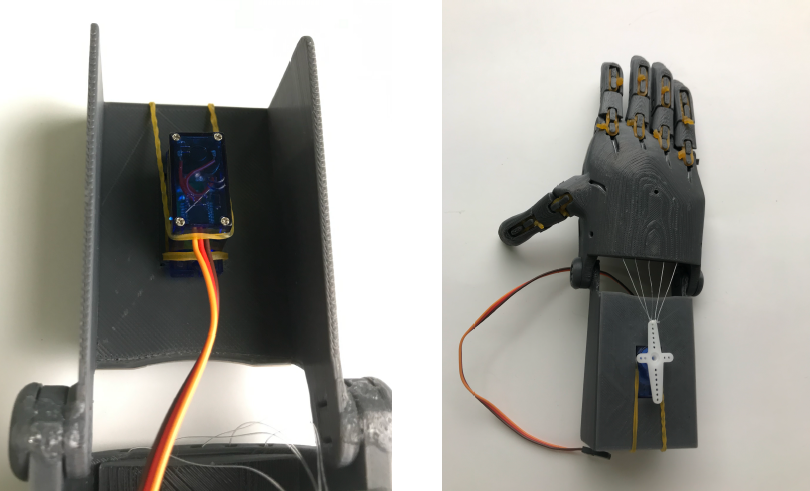
21-сурет. Сервомотор мен қармақ жіптері
8. 1 басқару түймесі сервомотор арқылы саусақтарды бүгеді жəне жазады. Ол үшін 22-суретте көрсетілгендей электр тізбегі жиналып, төмендегі сілтемеде берілген
Код
#include <Servo.h>
Servo myservo;
#define CTS1Pin 2 // Pin for capactitive touch sensor 1
#define CTS2Pin 3 // Pin for capactitive touch sensor 2
int pos;
void setup()
{
myservo.attach(9); // attaches the servo on pin 9 to the servo object
}
void loop()
{
int CTSValue1 = digitalRead(CTS1Pin);
int CTSValue2 = digitalRead(CTS2Pin);
if (CTSValue1 == HIGH)
{
for (pos = 0; pos <= 180; pos += 1)
myservo.write(pos);
delay(15);
}
if(CTSValue2==HIGH)
{
for (pos = 180; pos >= 0; pos -= 1)
myservo.write(pos);
delay(15);
}
ARDUINO коды жазылады.
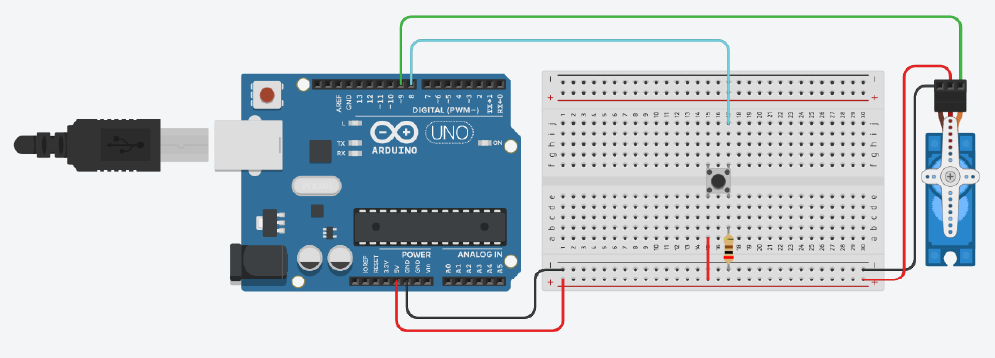
22-сурет. Саусақтардың бүгіліп жазылуына қажетті тізбек